【菲尔兹学院夏令营】复杂网络3-社区结构
社区结构
- 图划分(graph partitions)算法比较
- 图聚类算法
- 图上的集成聚类(ECG)
图社区
- 定义
- 谱分割
- Girvan-Newman聚类
- 基准:种植分区,LFR
- 模块度
- 算法
定义
两个基本假设:[Barabasi,Network Science]
- 一个网络的社区结构在其布局图中是唯一的。
- 一个社区是网络中的一个局部密集连接子图。
模型:
- 对于一个图 G = ( V , E ) G = (V , E) G=(V,E),考虑由一个节点 V C ⊂ V V_C⊂V VC⊂V的子集诱导的连接子图C(C中的节点满足 i ∈ V C i∈V_C i∈VC)。
内部外部度:
-
定义节点 i ∈ V C i∈V_C i∈VC的内部度(其在子图C内的度): d i i n t ( C ) d^{int}_i (C) diint(C)
-
节点i的外部度是: d i e x t ( C ) = d i − d i i n t ( C ) d^{ext}_i (C) = d_i - d^{int}_i (C) diext(C)=di−diint(C)
其中 d i d_i di是节点i在G中的总度
强弱社区:
- 如果对每个节点 i ∈ V C i∈V_C i∈VC , d i i n t ( C ) > d i e x t ( C ) d^{int}_i (C) > d^{ext}_i (C) diint(C)>diext(C),则C是一个强社区(strong community)
- 如果对每个节点 i ∈ V C i∈V_C i∈VC , ∑ i ∈ V C d i int ( C ) > ∑ i ∈ V C d i e x t ( C ) \sum_{i \in V_C} d_i^{\text {int }}(C)>\sum_{i \in V_C} d_i^{e x t}(C) ∑i∈VCdiint (C)>∑i∈VCdiext(C),则C是一个弱社区(weak community)
集团和核:
- 集团(clique)是G的一个完全连接的子图。
- k核(k-core)是G的一个最大连接子图,其中所有节点的度数至少为k
- 我们可以通过反复删除所有度数小于k的节点来找到k-cores
- 如果一个节点属于k-core但不属于(k+1)-core,那么这个节点的核心度(coreness)为k
簇(聚类):
- 大小为k的图 G = ( V , E ) G = (V, E) G=(V,E)的聚类(clustering)是一个节点 V = V 1 ∪ . . . ∪ V k V = V_1 \cup...\cup V_k V=V1∪...∪Vk的分区,其中:
- 所有 V i ∩ V j = ∅ i ≠ j V_i \cap V_j=\emptyset \space i \neq j Vi∩Vj=∅ i=j
- 对于每个部分(或集群) V i V_i Vi,其诱导子图 G i G_i Gi是连通的
谱聚类
谱聚类(Spectral clustering)是一个庞大的话题,本课程只介绍明谱分割(spectral bisection)
参考:
https://blog.csdn.net/weixin_45591044/article/details/122747024
https://blog.csdn.net/SL_World/article/details/104423536
模型:
-
考虑未加权的无向图 G = ( V , E ) G = (V , E) G=(V,E),邻接矩阵为A
-
D是节点度组成的对角矩阵
-
L = D − A L = D - A L=D−A是G的(未归一化的)拉普拉斯系数矩阵
-
G中的社群结构与L的特征分解之间关系紧密
-
对于所有的 f ∈ R n f \in \mathbb{R}^n f∈Rn:
f t L f = 1 2 ∑ i , j a i j ( f i − f j ) 2 f^t L f=\frac{1}{2} \sum_{i, j} a_{i j}\left(f_i-f_j\right)^2 ftLf=21i,j∑aij(fi−fj)2
因此,当 a i j > 0 a_{ij}>0 aij>0时,使上述表达式最小化相当于使 f i ≈ f j f_i≈f_j fi≈fj
求解:
-
考虑比率切分法 ratio-cut : V = S ∪ S c V=S \cup S^c V=S∪Sc
与之对应的还有normalized-cut(将拉普拉斯矩阵归一化)
Rcut ( S , S c ) = Vol∂S ∣ S ∣ + Vol∂S ∣ S c ∣ w h e r e Vol ( ∂ S ) = ∣ { e : ∣ E ∩ S ∣ = ∣ E ∩ S c ∣ = 1 } ∣ \operatorname{Rcut}\left(S, S^c\right)=\frac{\operatorname{Vol\partial S}}{|S|}+\frac{\operatorname{Vol\partial S}}{\left|S^c\right|} \\ where \operatorname{Vol}(\partial S)=\left|\left\{e:|E \cap S|=\left|E \cap S^c\right|=1\right\}\right| Rcut(S,Sc)=∣S∣Vol∂S+∣Sc∣Vol∂SwhereVol(∂S)=∣{e:∣E∩S∣=∣E∩Sc∣=1}∣
这可以近似求解为:
min f ∈ R n f t L f ; f ⊥ 1 , ∥ f ∥ = n \min _{f \in \mathbb{R}^n} f^t L f ; f \perp 1,\|f\|=\sqrt{n} f∈RnminftLf;f⊥1,∥f∥=n
其中,结果是对应于L的第二个最小特征值的特征向量——结论推导见参考博客
讨论:
-
L是对称的和半正定的,所以所有的特征值都是实数和非负数。
-
L有最小的特征值0;这个特征值的倍数对应于G中连接组件的数量。
-
因此,我们可以对这些特征值进行排序,同时对它们各自的特征向量进行排序。
0 = λ 1 ≤ λ 2 . . . ≤ λ n 0 = λ_1 ≤ λ_2... ≤ λ_n 0=λ1≤λ2...≤λn
非连通图情况:
- 有至少两个0特征值
- 按照第二小特征值对应的特征向量,有0和非0两种情况,按这个分类即可。
连通图情况:
-
考虑一个连通图G。它只有一个0特征值。
-
在一个连通图中,特征向量 u 2 u_2 u2对应于费德勒向量中的 λ 2 > 0 λ_2>0 λ2>0。
-
谱分割是基于费德勒向量(第二小的特征向量)中条目的符号。——正为一类,负为另一类
多个社区:
- 如果有2个以上的聚类,这样的过程可以被递归应用
- 这是一个分裂性层次聚类的例子
- 然而,它可能表现得很糟糕,可能会分割本来存在的社区
- 所以我们去 u 2 , . . . u k u_2, ... u_k u2,...uk,再利用k-means等算法对得到的特征向量进行聚类
总结:
一般适用于分组数量已知的情况,核心是最小化割边总和并最大化每个簇的节点数
GN算法
Girvan-Newman算法
步骤:
- 计算每个 $e ∈ E $的边介数,并删除具有最高值的边
- 将生成的图按连通分支拆分(簇)并递归地应用该方法
- 这会产生一个聚类层次结构,我们可以将其表示为树状图
——根据一些标准选择最好的分区,比如模块度(modularity)、或指定集群数量
问题:
- 该算法的一个问题是它的时间复杂度: O ( m 2 n ) O(m^2n) O(m2n)
- 对于非常稀疏的图,也有 $O(n^3) $,仍然很高
- 其他算法可以达到 O ( m ) O(m) O(m) 或 O ( n l o g n ) O(n log n) O(nlogn)
基准
为什么要有社区基准模型?
- 测试和比较算法
- 控制噪音水平、社区规模等
- 真实图数据很少有真实值(ground-truth)
- 有ground-truth,但可能与基本假设不一致
种植-分区模型
Planted partitions model
- 固定节点数 n 和社区数 k,对于社区,我们:
-
平均分配节点到每个社区
-
或将每个节点独立分配给社区 i,概率为 p i p_i pi, ∑ p i = 1 \sum p_i=1 ∑pi=1
- 对于分别在社区i和社区j中的节点对 ( i , j ) (i, j) (i,j),我们按照概率 P ( i , j ) P(i, j) P(i,j)添加边
- 可以指定 P ( i , i ) = p i n P(i, i)=p_{in} P(i,i)=pin、 P ( i , j ) = p o u t , i ≠ j P(i, j)=p_{out}, \space i \neq j P(i,j)=pout, i=j
LFR模型
Lancichinetti-Fortunato-Radicchi model
-
固定节点数 n
-
设定三个主要参数:
- γ 1 γ_1 γ1:节点度服从 p n ∝ n − γ 1 p_n ∝ n^{−γ_1} pn∝n−γ1 的幂律分布;推荐值为 2 ≤ γ 1 ≤ 3 2 ≤ γ_1 ≤ 3 2≤γ1≤3。
- γ 2 γ_2 γ2:社区规模服从 p k ∝ k − γ 2 p_k ∝ k^{−γ_2} pk∝k−γ2 的幂律分布;推荐值为 1 ≤ γ 2 ≤ 2 1 ≤ γ_2 ≤ 2 1≤γ2≤2。
- 0 ≤ µ ≤ 1 0 ≤ µ ≤ 1 0≤µ≤1:对于每个节点,这是连接到其他社区的边的预期比例,而 ( 1 − µ ) (1 − µ) (1−µ) 是其自己社区内的比例。
—— µ µ µ 称为噪声水平或混合参数
-
把每个节点都分配到社区
- 存在允许重叠社区的变体
- 可以提供额外参数来限制度分布(平均和最大度)和社区大小(最小和最大)
- 从配置模型开始,重新连接节点以逼近目标分布
- 初始阶段可以使用BA等其他模型
基准代码生成 3 个文件:
- 包含节点标记为 1 的边列表的文件
- 包含节点列表及其社区成员的文件,社区也被标记为 1
- 具有度分布、社区大小分布和混合参数等统计信息的文件
讨论:
-
LFR 的可扩展性有些受限,一些可扩展的基准模型有:
-
RMAT ,生成具有幂律度数分布的图;在 Graph-500 中使用
-
BTER (Block Two-level ER),生成服从幂律度分布以及社区结构的图
-
SBM(Stochastic Block Model),它也生成具有社区结构的图。
——它最简单的定义是种植分区模型的变体。
-
模块度
引言:
- Barabasi 的第三个基本假设:随机连线的网络缺乏固有的社区结构
- 模块度使用随机连接作为空模型来量化某些图分区的社区结构
模型:
-
考虑无向图 G = ( V , E ) G = (V , E) G=(V,E)
-
令 ∣ V ∣ = n |V| = n ∣V∣=n, ∣ E ∣ = m |E| = m ∣E∣=m, d i d_i di 为节点 i 的度数
-
设 a i j = a j i = 1 a_{ij} = a_{ji} = 1 aij=aji=1 当且仅当 ( i , j ) ∈ E (i, j) ∈ E (i,j)∈E,否则为 0;设 a i i = 2 a_{ii} = 2 aii=2当且仅当 $(i, i) ∈ E $
-
当我们随机连线时,节点 i 和 j 之间的预期边数(概率)为:
p i j = d i d j 2 m p_{ij}=\frac{d_id_j}{2m} pij=2mdidj -
令 V = C 1 ∪ ⋅ ⋅ ⋅ C k V = C_1 ∪ · · · C_k V=C1∪⋅⋅⋅Ck,将图划分为 k 个簇。对于某些簇 C l C_l Cl,定义:
q C l = 1 2 m ∑ i , j ∈ C l ( a i j − p i j ) q_{C_l}=\frac{1}{2 m} \sum_{i, j \in C_l}\left(a_{i j}-p_{i j}\right) qCl=2m1i,j∈Cl∑(aij−pij)
展开为:
q C l = ∑ i , j ∈ C l a i j 2 m − ∑ i , j ∈ C l d i d j ( 2 m ) 2 q_{C_l}=\frac{\sum_{i, j \in C_l} a_{i j}}{2 m}-\frac{\sum_{i, j \in C_l} d_i d_j}{(2 m)^2} qCl=2m∑i,j∈Claij−(2m)2∑i,j∈Cldidj
令:
e ( C l ) = ∣ e ∈ E ; e ⊆ C l ∣ e(C_l) = |{e ∈ E ; e⊆C_l}| e(Cl)=∣e∈E;e⊆Cl∣Vol ( C l ) = ∑ i ∈ C l d i \operatorname{Vol}\left(C_l\right)=\sum_{i \in C_l} d_i Vol(Cl)=i∈Cl∑di
代入可得:
q C l = e ( C l ) m − ( Vol ( C l ) 2 m ) 2 q_{C_l}=\frac{e\left(C_l\right)}{m}-\left(\frac{\operatorname{Vol}\left(C_l\right)}{2 m}\right)^2 qCl=me(Cl)−(2mVol(Cl))2 -
模块度最终定义为:
q = ∑ l = 1 k e ( C l ) m − ( Vol ( C l ) 2 m ) 2 q=\sum_{l=1}^k \frac{e\left(C_l\right)}{m}-\left(\frac{\operatorname{Vol}\left(C_l\right)}{2 m}\right)^2 q=l=1∑kme(Cl)−(2mVol(Cl))2我们将上面的第一项称为边缘贡献(edge contribution),将第二项称为度税(degree tax)
-
图的模块度 q ∗ ( G ) q^∗(G) q∗(G) 有时被定义为所有可能分区中上述指标所取的最大值
讨论(局限):
-
Barabasi 的第四个基本假设:对于一个给定的网络,具有最大模块化的分区对应于最佳社区结构。
-
然而,模块化有一些已知的问题——"最佳 "可能并不总是转化为 “直观”。
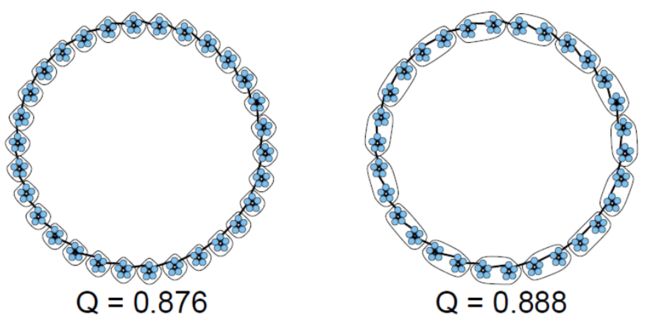
基于模块化的算法受到分辨率限制问题的影响:
- 考虑l个大小为m的集团(m-clique)组成的环, n = l ⋅ m n=l·m n=l⋅m
- 当 m ( m − 1 ) < l − 2 m(m - 1)< l - 2 m(m−1)<l−2时,对相邻的集团进行分组,模块度高于每个集团自己形成集群
- 正如我们将说明的那样,一些基于模块化的算法因此倾向于对已有社区进行组合
算法
CNM:
CNM算法(Clauset、Newman、Moore),也称为快速贪心算法(Fast Greedy)
- 开始,每个顶点作为一个单独集群
- 选择最能提高模块度的一对集群(如果有的话),然后合并它们
- 当没有办法提高模块度的时候停止
- 复杂度: O ( n 2 ) O(n^2) O(n2),稀疏图更少
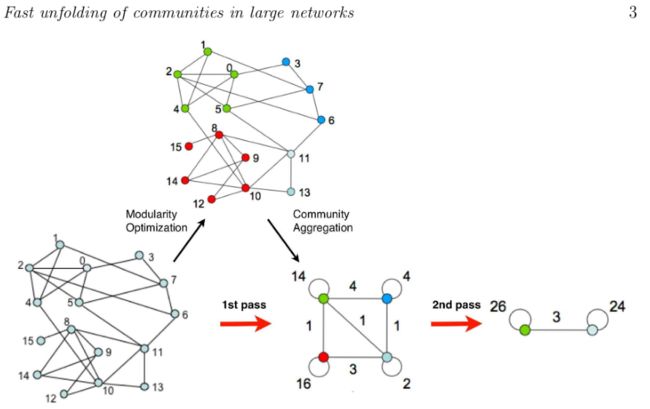
Louvain:
也称为多级算法(Multilevel algorithm)或快速折叠算法(fast unfolding)
- 开始,每个顶点作为一个单独集群
- 循环遍历每个顶点,将其移动到模块度增加最多(如果有的话)的邻居社区
- 重复以上步骤,直到没有任何提升空间为止
- 将每个社区折叠成一个节点并重新运行上述步骤——另一个层级
- 当图折叠到单个节点(或者当最后一级没有移动)时停止
- 复杂度: O ( n l o g n ) O(n log n) O(nlogn)
Infomap:
- Infomap基于信息论:使用概率随机游走和压缩算法来实现
- 给定 G 和一个初始化分区方案,尽可能高效地编码随机游走
- 利用随机游走往往在同一社区中停留更长时间的性质
- 优化图方程:社区间游走的平均位数+社区内游走的平均位数
- 复杂度: O ( n l o g n ) O(n log n) O(nlogn)
标签传播:
- 开始,每个顶点作为一个单独集群,有自己的簇标签
- 循环遍历每个顶点,每个顶点都采用其邻居中最流行的标签(使用随机来打破死锁)
- 当每个顶点具有与其邻域中最频繁出现的标签相同的簇标签时,算法停止
- 复杂度: O ( m ) O(m) O(m)
——注意:此算法速度很快,但并不总能收敛到一个解。
其他:
- WalkTrap:一种基于短距离随机游走的分层算法。它的复杂度是 O ( n 2 l o g n ) O(n^2 log n) O(n2logn)。
- Leading eigenvector(前导特征向量):基于模块化矩阵的谱分解。对于每个双分区,其复杂度为 O ( n ( n + m ) ) O(n(n + m)) O(n(n+m))
Louvain和Infomap的算法目前被认为是最先进的。
2023年评论:应该是Leiden算法
图分区的比较(指标)
- 介绍:图聚类
- 常见的相似性测度量
- 与二元分类的联系
- 图感知度量 (Graph-aware measures)
- 拓扑学特征
图聚类
符号描述:
G = ( V , E ) , E ⊂ V × V , ∣ V ∣ = n , ∣ E ∣ = m G = (V , E), E ⊂ V × V , |V | = n, |E| = m G=(V,E),E⊂V×V,∣V∣=n,∣E∣=m
- A,邻接矩阵: a i j = 1 ⇔ ( i , j ) ∈ E a_{ij} = 1 ⇔ (i, j) ∈ E aij=1⇔(i,j)∈E
- d i d_i di:顶点i的程度
术语解释:
- 图聚类/分割(clustering/partitioning):将顶点分割成相连的子图
- 社区发现(Community finding):并非所有的顶点都需要被分配到一个群组中去
- 模糊聚类(Fuzzy clustering):节点不属于、属于一个或多个群组
图划分: A = { A 1 , A 2 , . . . , A k } \mathbf A = \{A_1, A_2, ..., A_k\} A={A1,A2,...,Ak},为节点集 V V V的一个划分(partition)
- 每个 A i A_i Ai诱导出一个连通子图
- 是连通分支的泛化
- 集群内的边密度大;集群间的边密度小
应用:
-
图聚类是关系型EDA(互联网数据分析)的一个重要工具
- 图尺寸缩减
- 社区检测
- 异常检测
- ……
-
如何挑选聚类算法?
- 集群的质量
- 稳定性
- 效率(时间空间)
- 其他:不需要指定聚类的数量(k)、集群的层次结构等
优化目标:
-
这是无监督学习,所以没有明确的目标函数
-
不同算法使用不同的目标函数:
- 模块度:
Q = 1 2 m ∑ i , j ∈ 同一簇 ( a i j − d i d j 2 m ) Q=\frac{1}{2 m} \sum_{i, j \in \text {同一簇} }\left(a_{i j}-\frac{d_i d_j}{2m}\right) Q=2m1i,j∈同一簇∑(aij−2mdidj)
- N-cut
∑ i cut ( A i , A i ‾ ) # edges in A i \sum_i \frac{\text { cut }\left(A_i, \overline{A_i}\right)}{\# \text { edges in } A_i} i∑# edges in Ai cut (Ai,Ai)
不同分割方法对比:
- 质量的衡量标准: s i m ( T , A ) w.r.t. ground truth partition T sim(\mathbf T, \mathbf A) \space \text {w.r.t. ground truth partition} \space \mathbf T sim(T,A) w.r.t. ground truth partition T
- 稳定性的衡量标准:同一算法的运行多次比较 s i m ( A , A ′ ) sim(\mathbf A, \mathbf {A'}) sim(A,A′)
- 比较算法之间的结果: s i m ( A , B ) sim(\mathbf A, \mathbf B) sim(A,B)
相似性
总体分类:
-
基于成对计数(Pairwise-counting)
P W f ( A , B ) = ∣ P A ∩ P B ∣ f ( ∣ P A ∣ , ∣ P B ∣ ) P W_f(\mathbf{A}, \mathbf{B})=\frac{\left|P_A \cap P_B\right|}{f\left(\left|P_A\right|,\left|P_B\right|\right)} PWf(A,B)=f(∣PA∣,∣PB∣)∣PA∩PB∣ -
基于信息论
M I f ( A , B ) = I ( A , B ) f ( H ( A ) , H ( B ) ) M I_f(\mathbf{A}, \mathbf{B})=\frac{I(\mathbf{A}, \mathbf{B})}{f(H(\mathbf{A}), H(\mathbf{B}))} MIf(A,B)=f(H(A),H(B))I(A,B) -
基于卡方分布( χ 2 χ^2 χ2)
X f 2 ( A , B ) = X 2 ( A , B ) f ( ( k − 1 ) , ( r − 1 ) ) f ( x , y ) ∈ { min ( x , y ) , max ( x , y ) , mean ( x , y ) , x y } \begin{gathered} X_f^2(\mathbf{A}, \mathbf{B})=\frac{X^2(\mathbf{A}, \mathbf{B})}{f((k-1),(r-1))} \\ f(x, y) \in\{\min (x, y), \max (x, y), \operatorname{mean}(x, y), \sqrt{x y}\} \end{gathered} Xf2(A,B)=f((k−1),(r−1))X2(A,B)f(x,y)∈{min(x,y),max(x,y),mean(x,y),xy}
基于成对计数:
-
考虑对图节点的两个划分:
A = ( A 1 , . . . , A k ) = ( { 1 , 2 , . . , 7 } , { 8 } , ⋅ ⋅ ⋅ ) \mathbf A = (A_1, ..., A_k) = (\{1, 2, .., 7\}, \{8\}, · · · ) A=(A1,...,Ak)=({1,2,..,7},{8},⋅⋅⋅)
B = ( B 1 , . . . , B r ) = ( { 1 } , { 2 , 3 , 4 } , { 5 , 6 , 7 , 8 } , ⋅ ⋅ ⋅ ) \mathbf B = (B_1, ..., B_r ) = (\{1\}, \{2, 3, 4\}, \{5, 6, 7, 8\}, · · · ) B=(B1,...,Br)=({1},{2,3,4},{5,6,7,8},⋅⋅⋅)
-
度量指标基于A和B里面各个集群中的成对元素
P A = { ( 1 , 2 ) , ( 1 , 3 ) , ( 1 , 4 ) , ( 1 , 6 ) , ( 1 , 7 ) , ( 2 , 3 ) , ⋅ ⋅ ⋅ } P_A = \{(1, 2), (1, 3), (1, 4), (1, 6), (1, 7), (2, 3), · · · \} PA={(1,2),(1,3),(1,4),(1,6),(1,7),(2,3),⋅⋅⋅}
P B = { ( 2 , 3 ) , ( 2 , 4 ) , ( 3 , 4 ) , ( 5 , 6 ) , ( 5 , 7 ) , ( 5 , 8 ) , ⋅ ⋅ ⋅ } P_B = \{(2, 3), (2, 4), (3, 4), (5, 6), (5, 7), (5, 8), · · · \} PB={(2,3),(2,4),(3,4),(5,6),(5,7),(5,8),⋅⋅⋅}
-
关键值为: ∣ P A ∩ P B ∣ |P_A ∩ P_B| ∣PA∩PB∣
-
示例:
-
Jaccard 指数:
∣ P A ∩ P B ∣ ∣ P A ∪ P B ∣ \frac {|P_A ∩ P_B|} {|P_A ∪ P_B|} ∣PA∪PB∣∣PA∩PB∣ -
兰德指数
∣ P A ∩ P B ∣ + ∣ P A ‾ ∩ P B ‾ ∣ ( n 2 ) \frac {|P_A ∩ P_B| + |\overline {P_A} ∩ \overline {P_B}|} {\left(\begin{array}{c} n \\ 2 \end{array}\right)} (n2)∣PA∩PB∣+∣PA∩PB∣
-
基于信息论:
-
基于 A 和 B 之间的互信息
-
关键值为:
I ( A , B ) = ∑ i , j ∣ A i ∩ B j ∣ n log ∣ A i ∩ B j ∣ / n ∣ A i ∣ ∣ B j ∣ / n 2 I(\mathbf{A}, \mathbf{B})=\sum_{i, j} \frac{\left|A_i \cap B_j\right|}{n} \log \frac{\left|A_i \cap B_j\right| / n}{\left|A_i\right|\left|B_j\right| / n^2} I(A,B)=i,j∑n∣Ai∩Bj∣log∣Ai∣∣Bj∣/n2∣Ai∩Bj∣/n -
示例:归一化互信息 (NMI):
I ( A , B ) ( H ( A ) + H ( B ) ) / 2 \frac {I(\mathbf A, \mathbf B)} {(H(\mathbf A)+H(\mathbf B))/2} (H(A)+H(B))/2I(A,B)
基于卡方分布:
-
关键值为:
X 2 ( A , B ) = ∑ i , j 1 ∣ A i ∣ ∣ B j ∣ ( ∣ A i ∩ B j ∣ − ∣ A i ∣ ∣ B j ∣ n ) 2 X^2(\mathbf{A}, \mathbf{B})=\sum_{i, j} \frac{1}{\left|A_i\right|\left|B_j\right|}\left(\left|A_i \cap B_j\right|-\frac{\left|A_i\right|\left|B_j\right|}{n}\right)^2 X2(A,B)=i,j∑∣Ai∣∣Bj∣1(∣Ai∩Bj∣−n∣Ai∣∣Bj∣)2 -
示例:Cramer 的 V指标 和 Tschurprow 的 T指标
测量指标vs.大小分布:
问题:比较不同大小的分区时,这些度量指标表现怎么样?
实验(多次重复):
- A \mathbf A A:节点V的划分 ∣ V ∣ = 10 |V|=10 ∣V∣=10
- B ( t ) \mathbf B^{(t)} B(t),V 的随机分区 ∣ B ( t ) ∣ = t |\mathbf B^{(t)}| =t ∣B(t)∣=t, t = 2 、 5 、 10 、 20 、 30 、 40 、 50 、 100 t = 2、5、10、20、30、40、50、 100 t=2、5、10、20、30、40、50、100
- 测量 A \mathbf A A 和所有分区 B ( t ) \mathbf B^{(t)} B(t) 之间的相似性——期望所有相似度都很低
——结果:只有兰德系数变得接近1,其他都随着t的增大减小或趋向0
按概率进行调整:
实现 “在聚类结果随机产生的情况下,指标应该接近零”
Adjusted Similarity ( A , B ) = Similarity ( A , B ) − Expected Sim ( ∣ A i ∣ ′ s , ∣ B j ∣ ′ s ) 1 − Expected Sim ( ∣ A i ∣ ′ s , ∣ B j ∣ ′ s ) \text { Adjusted Similarity }(\mathbf{A}, \mathbf{B})=\frac{\operatorname{Similarity}(\mathbf{A}, \mathbf{B})-\operatorname{Expected} \operatorname{Sim}\left(\left|A_i\right|^{\prime} s,\left|B_j\right|^{\prime} s\right)}{1-\text { Expected } \operatorname{Sim}\left(\left|A_i\right|^{\prime} s,\left|B_j\right|^{\prime} s\right)} Adjusted Similarity (A,B)=1− Expected Sim(∣Ai∣′s,∣Bj∣′s)Similarity(A,B)−ExpectedSim(∣Ai∣′s,∣Bj∣′s)
-
成对计数指标的调整:
A P W f ( A , B ) = ∣ P A ∩ P B ∣ − ∣ P A ∣ ∣ P B ∣ / ( n 2 ) f ( ∣ P A ∣ , ∣ P B ∣ ) − ∣ P A ∣ ∣ P B ∣ / ( n 2 ) A P W_f(\mathbf{A}, \mathbf{B})=\frac{\left|P_A \cap P_B\right|-\left|P_A\right|\left|P_B\right| /\left(\begin{array}{c} n \\ 2 \end{array}\right)}{f\left(\left|P_A\right|,\left|P_B\right|\right)-\left|P_A\right|\left|P_B\right| /\left(\begin{array}{c} n \\ 2 \end{array}\right)} APWf(A,B)=f(∣PA∣,∣PB∣)−∣PA∣∣PB∣/(n2)∣PA∩PB∣−∣PA∣∣PB∣/(n2) -
Jaccard 没有已知的调整形式
-
调整兰德指数定义为:
A R I ( A , B ) = A P W m e a n ( A , B ) ARI(\mathbf A, \mathbf B) = APW_{mean}(\mathbf A, \mathbf B) ARI(A,B)=APWmean(A,B) -
基于信息论和基于 χ 2 χ^2 χ2 的也可以针对机会进行调整
-
最常用的有:
- ARI:调整兰德系数
- AMI:调整互信息
——调整后的指标在随机下都趋近于0
二元划分
我们已经有了对比划分的指标,但我们根本没有考虑图拓扑。
测量相似性时应该考虑边吗?
这就引出了下面要讲的图感知测量,在这之前,要先讲下二元划分
边分类:
-
图分区可以由节点 V 上的集合分区表示
A = ( { 1 } , { 2 , 3 , 4 } , { 5 , 6 , 7 , 8 } , { 9 , 10 , 11 } , { 12 } ) \mathbf A = (\{1\}, \{2, 3, 4\}, \{5, 6, 7, 8\}, \{9, 10, 11\}, \{12\}) A=({1},{2,3,4},{5,6,7,8},{9,10,11},{12})
-
我们还可以考虑二元边分类(顶点是否在同一簇中)
( 2 , 3 ) , ( 2 , 4 ) , ( 3 , 4 ) , . . . , ( 9 , 10 ) , ( 9 , 11 ) , ( 10 , 11 ) → c l a s s 1 (2, 3), (2, 4), (3, 4), ..., (9, 10), (9, 11), (10, 11) → class 1 (2,3),(2,4),(3,4),...,(9,10),(9,11),(10,11)→class1——两端节点在同一簇的边
( 1 , 2 ) , ( 4 , 5 ) , ( 8 , 10 ) , ( 11 , 12 ) → c l a s s 0 (1, 2), (4, 5), (8, 10), (11, 12) → class 0 (1,2),(4,5),(8,10),(11,12)→class0——两端节点在不同簇的边 -
更正式地说,对于顶点分区 A,我们定义长度为 m 的二元向量 b A b_A bA,其中,对于每条边 e = ( i , j ) ∈ E e = (i, j) ∈ E e=(i,j)∈E:
b A ( e ) = { 1 ∃ A k ∈ A ∣ i , j ∈ A k 0 otherwise. b_{\mathbf{A}}(e)=\left\{\begin{array}{cc} 1 & \exists A_k \in \mathbf{A} \mid i, j \in A_k \\ 0 & \text { otherwise. } \end{array}\right. bA(e)={10∃Ak∈A∣i,j∈Ak otherwise. -
更进一步地,可以利用此方法对类别1边子集的边进行搜寻。
二元分类器的评估:
-
考虑 b A b_A bA 和 b B b_B bB,两个二元边分类器。
-
用于比较二元分类器的四个基本计数是:
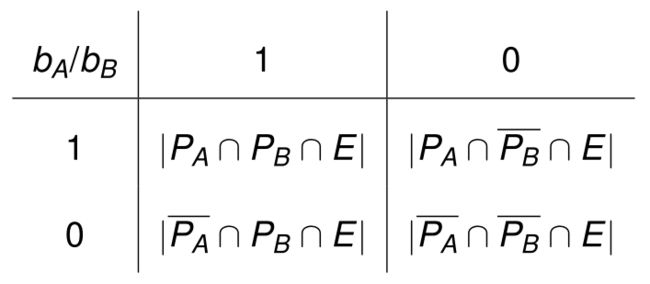
-
对应的各种度量指标如下:
准确性—— g R : ∣ P A ∩ P B ∩ E ∣ + ∣ P A ‾ ∩ P B ‾ ∩ E ∣ ∣ E ∣ J a c c a r d —— gJ: ∣ P A ∩ P B ∩ E ∣ ∣ ( P A ∪ P B ) ∩ E ∣ F 分数 ( β = 1 ) —— g P W m n : ∣ P A ∩ P B ∩ E ∣ 1 2 ( ∣ P A ∩ E ∣ + ∣ P B ∩ E ∣ ) 余弦相似度—— g P W g m n : ∣ P A ∩ P B ∩ E ∣ ∣ P A ∩ E ∣ ∣ P B ∩ E ∣ S i m p s o n —— g P W min : ∣ P A ∩ P B ∩ E ∣ min { ∣ P A ∩ E ∣ , ∣ P B ∩ E ∣ } B r a u n & B a n q u e t —— g P W max : ∣ P A ∩ P B ∩ E ∣ max { ∣ P A ∩ E ∣ , ∣ P B ∩ E ∣ } \begin{aligned} 准确性——& \mathrm{gR}: \frac{\left|P_A \cap P_B \cap E\right|+\left|\overline{P_A} \cap \overline{P_B} \cap E\right|}{|E|} \\ Jaccard——& \text { gJ: } \frac{\left|P_A \cap P_B \cap E\right|}{\left|\left(P_A \cup P_B\right) \cap E\right|} \\ F 分数 (β = 1)——& \mathrm{gPW}_{m n}: \frac{\left|P_A \cap P_B \cap E\right|}{\frac{1}{2}\left(\left|P_A \cap E\right|+\left|P_B \cap E\right|\right)} \\ 余弦相似度——& \mathrm{gPW}_{g m n}: \frac{\left|P_A \cap P_B \cap E\right|}{\sqrt{\left|P_A \cap E\right|\left|P_B \cap E\right|}} \\ Simpson——& \mathrm{gPW}_{\min }: \frac{\left|P_A \cap P_B \cap E\right|}{\min \left\{\left|P_A \cap E\right|,\left|P_B \cap E\right|\right\}} \\ Braun\&Banquet——& \mathrm{gPW}_{\max }: \frac{\left|P_A \cap P_B \cap E\right|}{\max \left\{\left|P_A \cap E\right|,\left|P_B \cap E\right|\right\}} \\ & \end{aligned} 准确性——Jaccard——F分数(β=1)——余弦相似度——Simpson——Braun&Banquet——gR:∣E∣∣PA∩PB∩E∣+ PA∩PB∩E gJ: ∣(PA∪PB)∩E∣∣PA∩PB∩E∣gPWmn:21(∣PA∩E∣+∣PB∩E∣)∣PA∩PB∩E∣gPWgmn:∣PA∩E∣∣PB∩E∣∣PA∩PB∩E∣gPWmin:min{∣PA∩E∣,∣PB∩E∣}∣PA∩PB∩E∣gPWmax:max{∣PA∩E∣,∣PB∩E∣}∣PA∩PB∩E∣
图感知度量
(调整)图感知度量:
-
上一节的指标可以用二元分类向量的乘积表示:
∣ P A ∩ P B ∩ E ∣ = ∣ b A ⋅ b B ∣ \left|P_A \cap P_B \cap E\right| = |b_A · b_B| ∣PA∩PB∩E∣=∣bA⋅bB∣
-
我们提出一系列成对计数的图感知度量指标:(一个是普通、另一个是调整后的)
P C f ( A , B ; G ) = ∣ b A ⋅ b B ∣ f ( ∣ b A ∣ , ∣ b B ∣ ) ) , A P C f ( A , B ; G ) = ∣ b A ⋅ b B ∣ − ∣ b A ∣ ⋅ ∣ b B ∣ ∣ E ∣ f ( ∣ b A ∣ , ∣ b B ∣ ) − ∣ b A ∣ ⋅ ∣ b B ∣ ∣ E ∣ P C_f(\mathbf{A}, \mathbf{B} ; G)=\frac{\left|b_{\mathbf{A}} \cdot b_{\mathbf{B}}\right|}{\left.f\left(\left|b_{\mathbf{A}}\right|,\left|b_{\mathbf{B}}\right|\right)\right)}, \quad A P C_f(\mathbf{A}, \mathbf{B} ; G)=\frac{\left|b_{\mathbf{A}} \cdot b_{\mathbf{B}}\right|-\frac{\left|b_{\mathbf{A}}\right| \cdot\left|b_{\mathbf{B}}\right|}{|E|}}{f\left(\left|b_{\mathbf{A}}\right|,\left|b_{\mathbf{B}}\right|\right)-\frac{\left|b_{\mathbf{A}}\right| \cdot\left|b_{\mathbf{B}}\right|}{|E|}} PCf(A,B;G)=f(∣bA∣,∣bB∣))∣bA⋅bB∣,APCf(A,B;G)=f(∣bA∣,∣bB∣)−∣E∣∣bA∣⋅∣bB∣∣bA⋅bB∣−∣E∣∣bA∣⋅∣bB∣
实验:
- 在LFR模型构建的社区中,调整图感知度量的性能指标都很好
- 不同种类的度量指标的度量效果不同(引子)
补充:
——图感知和图无关度量在解决问题方面具有相反的行为
图无关度量即前面说的普通相似性指标ARI等
-
设 G 的真实社区情况为 A, 并设 B1 和 B2 分别是 A 的粗化和细化
-
在某些情况下,在图无关度量下A更接近B2(细化);在图感知度量下A更接近B1(粗化)
- 当使用图无关的度量时,集群的数量更多
- 图感知度量生成的集群的数量更少
-
这两种指标都获得高值是我们做图聚类所希望的
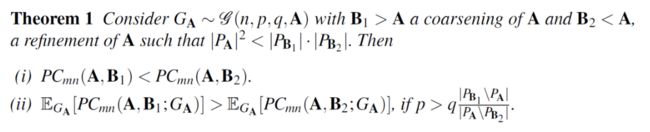
定理的公式化描述:
- 考虑Girvan 和 Newman 模型的变体 G(n, p, q, A),用于研究具有社区结构的图族
- 图有 n 个顶点,A为分区结果
- p为随机选择两个节点,其中的边在同一分区内的比例;
- q为随机选择两个节点,其中的边在不同分区内的比例。
拓扑特征
-
验证集群的另一种方法是比较集群的拓扑特征:参考Orman et al.,arXiv:1206.4987
-
示例:对于具有 n c n_c nc 个节点和 m c m_c mc 个边的社区 c c c——
-
缩放密度(scaled density): n c ⋅ m c / ( n c 2 ) n_c \cdot m_c /\left(\begin{array}{c} n_c \\ 2 \end{array}\right) nc⋅mc/(nc2)
-
内部传递性(internal transitivity): 1 n c ∑ i ∈ c e c ( i ) ( d c ( i ) 2 ) \frac{1}{n_c} \sum_{i \in c} \frac{e_c(i)}{\left(\begin{array}{c} d_c(i) \\ 2 \end{array}\right)} nc1∑i∈c(dc(i)2)ec(i)
其中 e c ( i ) e_c(i) ec(i) 是 c 中 i 的邻居之间的边数, d c ( i ) d_c(i) dc(i) 是 c 中 i 的度数。
-
-
可以将特征作为簇大小的函数进行比较——比较聚类算法结果和ground truth的图形相似度
结论
- 使用调整后的基于集合的相似性度量,可以减少度量对分区粒度的偏差,消除随机性
- 图无关(ARI,AMI)和图感知(AGRI)度量是互补的:在评估算法的优越性时应同时使用它们
图的集成聚类(ECG)
- 共识聚类和 ECG
- 分辨率和稳定性
- LFR 图上的研究
- 一些真实的图示例
- ECG 权重
- 在异常检测中的应用
ECG
符号说明:
- 令图 G = (V , E), V = {1, 2, . . . , n}, 为无向图
- 对于每个 e ∈ E,边可以具有权重 w(e) > 0,或者考虑所有 w(e) = 1
- 令 $P_i = {C^1_i , …, C^{l_i}_i} $ 是大小为 l i l_i li 的 V 的一个分区
- 定义指示函数 1 C i j ( v ) \mathbf 1_{C^j_i} (v) 1Cij(v),表示 v ∈ C i j v ∈ C^j_i v∈Cij
图聚类的目标:好的、可扩展的、通用的——注意这是无监督学习
- 关联强度的度量
- 聚类的层次结构
- 不需要或尽量少调整参数
——使用集成学习(Ensemble learning)来实现这些目标:利用生成的多个分区来集成——如何合并多个图分区?
ECG算法:
ECG算法是图的共识聚类算法。步骤是:
- 生成步骤:来自 Louvain (ML) 算法的 k 个随机的 1级别(level-1) 分区: P = P 1 , . . . P k P = {P_1, . . .P_k} P=P1,...Pk。
- 集成步骤:在初始图 G = (V, E) 的重新加权版本上运行 ML。 ECG权重是通过联合获得的。
边 e = ( u , v ) ∈ E e = (u, v) ∈ E e=(u,v)∈E 的 ECG 权重定义为:
W P ( u , v ) = { w ∗ + ( 1 − w ∗ ) ⋅ ( ∑ i = 1 k α P i ( u , v ) k ) , ( u , v ) ∈ 2 -core w ∗ , otherwise W_{\mathcal{P}}(u, v)=\left\{\begin{array}{lc} w_*+\left(1-w_*\right) \cdot\left(\frac{\sum_{i=1}^k \alpha_{P_i}(u, v)}{k}\right), & (u, v) \in 2 \text {-core } \\ w_*, & \text { otherwise } \end{array}\right. WP(u,v)={w∗+(1−w∗)⋅(k∑i=1kαPi(u,v)),w∗,(u,v)∈2-core otherwise
- 0 < w ∗ < 1 0 < w_∗ < 1 0<w∗<1 是人工定义的最小权重
- α P i ( u , v ) = ∑ j = 1 l i 1 C i j ( u ) ⋅ 1 C i j ( v ) α_{P_i} (u, v) = \sum ^{l_i}_{j=1} \mathbf 1_{C^j_i} (u) · \mathbf 1_{C^j_i} (v) αPi(u,v)=∑j=1li1Cij(u)⋅1Cij(v) 表示是否在 P i P_i Pi 的簇中共现。
通过示例可以看到,一个社区内的节点间的边在集成后权重变大,集团(clique)内的边尤其明显,而社区间的边集成后权重减小,变得很容易区分
分辨率和稳定性
分辨率:
- 基于模块化的算法存在分辨率限制问题:举例集团组成的环,相邻两个组合后模块度更大
- w* 值较小的 ECG 算法缓解了这个问题
- 使用 level-1的Louvain 作为弱学习器是关键——第一层louvain不会聚合那些环上的边
实验:
- 在广义集团环上ECG算法表现也很好:将ECG和louvain、InfoMap比较,分别考察环上连接集团边数从1增加到5时的表现
- 即使噪音很大,权重仍然很显著:当噪声很大时,同一集团中的边权重仍然显著
- 在LFR生成的社区发现上,ECG算法能够很好地保留原始数量:level1的louvain数量过多,最终的louvain数量过少
- 在上一章的图感知与图无关度量上表现也很好
稳定性:
- Louvain 和其他算法的已知问题:多次重新运行同一个算法会得到不同的结果
- 我们通过运行每个算法两次并应用一些比较措施(例如 ARI)来量化稳定性
实验:
- ECG相比louvain在稳定性方面有了很大的改善
- 实证研究表明,结果对参数的选择不是很敏感(低级聚类次数k和最小权重W*)——不过一般情况下k越大、W*越小效果越好。
LFR 图上的比较研究
- 论文在数千个 LFR 图上比较 8 种算法
- 各种指标水平都是ECG较好
- 本研究只考虑γ1 = 2, γ2 = 1,在不同参数的LFR模型下,ECG大部分情况下都比较好
一些观察结论:
- InfoMap 在大小相同的小型社区上提供最佳结果
- ECG 在其他情况下提供最佳结果
- ECG 的效果始终优于单个 Louvain (ML)
真实网络
-
足球俱乐部网络
- ECG和InfoMap都取得了最佳结果
-
YouTube网络
- 1,134,890 个节点(用户)和 2,987,624 条边(好友关系)
- 2-core 仅覆盖 41.1% 的顶点
- 8,385 个社区被声明为用户组,这些社区从拓扑角度来看非常薄弱
- 只有 12 个合格作为弱社区,外部度与总度的比率低于 0.5 我们将此比率扩展到 0.75(类似于 LFR 图中的 µ)
- 在图感知度量上ECG比InfoMap略胜一筹
权重
ECG 重新加权有助于提升聚类准确性和稳定性
我们讨论了计算的 ECG 权重的其他一些应用
- 我们定义了一个新的社区强度指数 (CSI)
- 我们展示了如何使用权重来放大种子顶点
社区强度指数CSI:
- 边界(0 和 1)附近的 ECG 权重的双峰分布(bi-modal distribution)表明了强大的社区结构
- 我们提出了一个基于点质量 Wasserstein 距离(推土机距离(Earth Mover’s distance))的简单社区强度指标 (CSI)
定义:
- 对于所有边 ( u , v ) ∈ E (u, v) ∈ E (u,v)∈E,以及来自 ECG 的 W P ( u , v ) W_P(u, v) WP(u,v),我们定义:
C S I = 1 − 2 ⋅ 1 ∣ E ∣ ∑ ( u , v ) ∈ E min ( W P ( u , v ) , 1 − W P ( u , v ) ) C S I=1-2 \cdot \frac{1}{|E|} \sum_{(u, v) \in E} \min \left(W_{\mathcal{P}}(u, v), 1-W_{\mathcal{P}}(u, v)\right) CSI=1−2⋅∣E∣1(u,v)∈E∑min(WP(u,v),1−WP(u,v))
使得 0 ≤ C S I ≤ 1 0 ≤ CSI ≤ 1 0≤CSI≤1
关联强度:
- 从图上直观看出高 ECG 权重表示强关联
- 从经验上比较 ECG 权重和三角形出现次数:正相关关系
我们可以使用 ECG 权重作为自我网络的替代方案来放大种子节点
给定一个种子节点 v:
- 确定它所属的集群
- 删除所有 ECG 权重低于某个阈值 τ 的边
- 放大包含 v 的连通分量
- 增加 τ 可以对其进一步放大
——使用此方法可以很好地保留ground truth里面的真实同社区节点
异常检测
最近提出了CADA(community-aware anomaly detection社团感知异常检测)
CADA:
对于每个节点 v ∈ V v ∈ V v∈V,令:
- N ( v ) N(v) N(v):v 的邻居数。
- N c ( v ) N_c(v) Nc(v): v 属于出现次数最多社区的邻居数(通过图聚类)。
C A D A x ( v ) = N ( v ) N c ( v ) CADA_x(v) = \frac{N(v)} {N_c(v)} CADAx(v)=Nc(v)N(v)
—— x ∈ { I M , M L } x ∈ \{IM, ML\} x∈{IM,ML}:即InfoMap算法和Louvain算法
实验:
-
原论文仅在 γ1 = 3、 γ2 = 2 的 LFR 图上验证了他们的算法——生成的是大小均一的小社区
-
我们用 ECG 重新审视了这种方法,并为幂律指数提供了更多值
-
对于每个图,我们添加了 200 个具有与 LFR 中相同的度分布的随机异常节点(随机边)
-
ECG算法表现都比较好
AUC(Area Under Curve)被定义为ROC曲线下与坐标轴围成的面积,显然这个面积的数值不会大于1。又由于ROC曲线一般都处于y=x这条直线的上方,所以AUC的取值范围在0.5和1之间。AUC越接近1.0,检测方法真实性越高;等于0.5时,则真实性最低,无应用价值。