树莓派4b安装Ubuntu20.04+ROS-noetic(也适用于历史版本)
树莓派4b安装Ubuntu20.04+ros-noetic
- 前言
- 一、镜像下载
- 二、烧录系统
-
- 1.插入tf卡,首先对tf卡进行格式化
- 2.烧录镜像
-
- 方法1.官方烧录软件 Raspberry Pi Imager
- 方法2.Win32DiskImager
- 3.烧录结束后系统会提示,U盘需要格式化,此时千万不能格式化!!!,弹出TF卡,插入树莓派,进行系统初始化
- 三、系统初始化
-
- 1.初始登录
- 2.修改密码
- 三、换国内源
-
- 1.搜索常用的国内原,例如清华源、阿里源、中科大源
- 2.更改`source.list`文件
- 四、安装桌面环境
- 五、安装ROS环境
-
- 1.添加ROS软件源和导入Key
- 2.安装桌面完整版
- 3.设置环境变量
- 4.ROS初始化
- 5.ROS 测试(roscore和小海龟)
-
- (1)roscore测试
- (2)rosrun turtlesim turtlesim_node
- (3)rosrun turtlesim turtle_teleop_key
前言
本文介绍了树莓派安装Ubuntu的安装步骤,支持Ubuntu的各种版本
以下是本篇文章正文内容,可供参考
一、镜像下载
Ubuntu适用于树莓派的最新版本(Ubuntu20.04)可在Ubuntu官网上下载

Ubuntu历史版本建议使用镜像网站下载http://cdimage.ubuntu.com/releases/

二、烧录系统
1.插入tf卡,首先对tf卡进行格式化
选一种方法即可:
2.烧录镜像
方法1.官方烧录软件 Raspberry Pi Imager
Raspberry Pi Imager连接
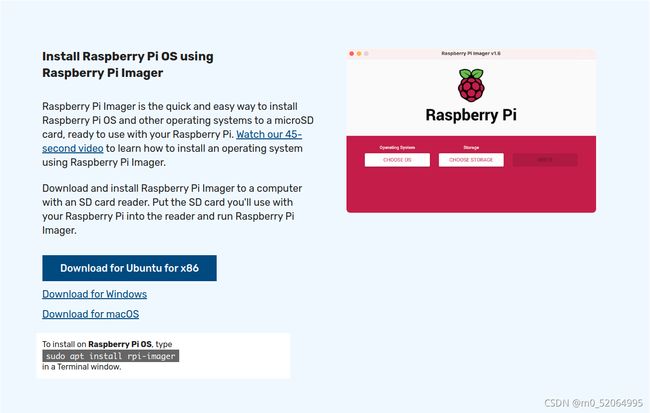
下载后安装打开

在CHOOSE OS中选择要烧录的镜像

选择要烧录的树莓派Ubuntu镜像
选择烧录的tf卡,烧录即可

方法2.Win32DiskImager
3.烧录结束后系统会提示,U盘需要格式化,此时千万不能格式化!!!,弹出TF卡,插入树莓派,进行系统初始化
三、系统初始化
建议使用显示器和鼠标键盘,会简单很多
1.初始登录
系统初始化后会提示输入用户名和密码,这里的用户名和密码均为ubuntu
2.修改密码
第一次登录后,系统会提示修改密码
提示输入当前用户名current user,输入ubuntu
接下来输入两次新密码,完成密码修改
三、换国内源
换国内原可以更快的下载软件和依赖
1.搜索常用的国内原,例如清华源、阿里源、中科大源
这里选用的是阿里源阿里源
2.更改source.list文件
首先对source.list备份,用于source.list文件的还原,
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
如果要将source.list还原
sudo cp /etc/apt/sources.list.bak /etc/apt/sources.list
终端输入,打开source.list文件
sudo nano /etc/apt/sources.list
将其中的网址全部替换为http://mirrors.aliyun.com/ubuntu-ports/
最终的效果
deb http://mirrors.aliyun.com/ubuntu/ focal main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal main restricted universe multiv>
deb http://mirrors.aliyun.com/ubuntu/ focal-security main restricted universe m>
deb-src http://mirrors.aliyun.com/ubuntu/ focal-security main restricted univer>
deb http://mirrors.aliyun.com/ubuntu/ focal-updates main restricted universe mu>
deb-src http://mirrors.aliyun.com/ubuntu/ focal-updates main restricted univers>
deb http://mirrors.aliyun.com/ubuntu/ focal-proposed main restricted universe m>
deb-src http://mirrors.aliyun.com/ubuntu/ focal-proposed main restricted univer>
deb http://mirrors.aliyun.com/ubuntu/ focal-backports main restricted universe >
deb-src http://mirrors.aliyun.com/ubuntu/ focal-backports main restricted unive>
执行
sudo apt-get updata
sudo apt-get upgrade
若无报错,则换源成功
四、安装桌面环境
sudo apt-get install ubuntu-desktop
重启系统即可看到Ubuntu经典桌面
roboot
五、安装ROS环境
1.添加ROS软件源和导入Key
这里建议使用国内软件源,ROS下载文件较大、所用时间较长,使用国内ROS软件源可以减少ROS下载时间。
国内ROS软件源使用方法可在软件源官网中查询:
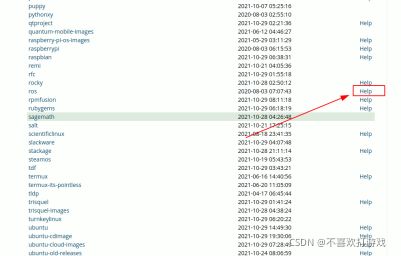
以中科大软件源为例:
在web中搜索中科大源

找到ros,点击右侧Help
#按照提示安装即可
#添加软件源
sudo sh -c 'echo "deb https://mirrors.ustc.edu.cn/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
#导入KEY
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
#更新软件源缓存
sudo apt update

2.安装桌面完整版
sudo apt install ros-noetic-desktop-full
安装过程所用时间较长,耐心等待。
3.设置环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
4.ROS初始化
这里不建议使用官方的rosdep初始化教程,容易出现无法连接等问题,使用国内源成功率较高,这里我用的是小鱼ROS解决初始化的方法,成功率较高。
sudo apt-get install python3-pip
sudo pip install rosdepc
sudo rosdepc init
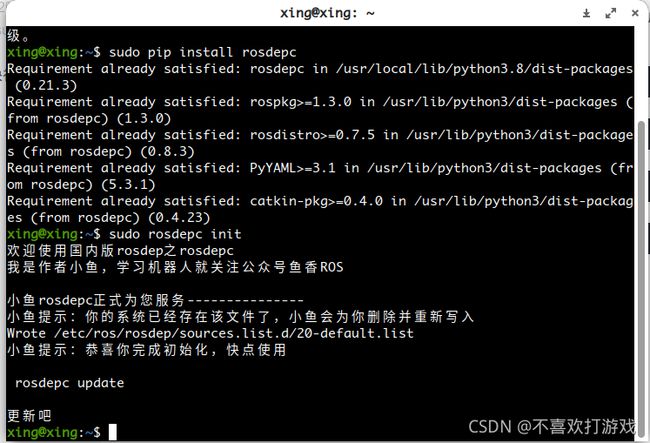
rosdepc update
5.ROS 测试(roscore和小海龟)
(1)roscore测试
roscore
(2)rosrun turtlesim turtlesim_node
rosrun turtlesim turtlesim_node
打开小海龟仿真界面
(3)rosrun turtlesim turtle_teleop_key
rosrun turtlesim turtle_teleop_key
通过键盘控制小海龟运动

看到小海龟运动,说明ROS安装成功了。