Silverlight 计算机图形学3 三维空间坐标
第一:奇次坐标
为什么要引入齐次坐标呢?这主要是由于以下两方面的原因:
首先,在物理学中, 矢量用于表示力和速度等物理量, 通常用具有长度和方向的线段来表示,如图4.1表示。我们往往用数学符号 表示一个矢量。它与空间位置无关。对于三维空间中位于(x, y, z)处的一个点P, 如果我们用一个列矩阵 来表示它, 这与矢量的表示会引起混淆。
其次,在二维或三维空间中,矩阵的乘积,例如Q=TP,只能表示旋转、比例和剪切等等变换,而不能表示平移变换。
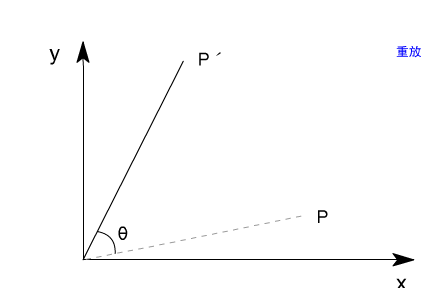
例如, 在图4.2中,点P绕坐标原点旋转θ角后到达P′,其坐标可以用下式计算:
(4-1-1)
其中
。
对于比例、反射和剪切等变换,我们都可以得到类似(4-1-1)式的矩阵表达式。但是,如果我们将物体沿直线路径从一个坐标位置平移到另一个坐标位置,即通过给原始坐标位置(x,y,z)加上平移距离t x、t y和t z后,使它移到新的位置(x′, y′, z′)。令P=[x, y, z] T, P t=[t x , t y , t z] T, P′=[x′, y′, z′] T, 则
。 (4-1-2)
上式的右边就不能象(4-1-1)式的右边那样写成两个矩阵相乘的形式。
为了避免这些困难,我们用4维列矩阵来表示三维空间中的点和矢量。假定用(e 1, e 2, e 3, P 0)指定三维空间坐标系的框架,其中,e 1, e 2和e 3是坐标轴矢量,P 0是坐标原点。则空间中的任何一个点P都可以在该坐标系框架下唯一地写成
。
我们可以用矩阵乘积的形式把上式改写成
。
严格地讲,上式并不是一个点积或内积,因为其矩阵的元素是不同的。上式右边的4维行矩阵就是P点在给定的坐标系框架下的齐次坐标表示。或者等价地说,P点的齐次坐标可以用4维列矩阵表示为
。
在同一个坐标系框架下,任何矢量V都可以写成
,
于是,V能够用列矩阵表示为 。
应当指出,这个式子几何上有不同的解释,我们在后面还会介绍。
仿射变换
仿射变换是计算机图形学中最常用的变换。下列形式的坐标变换称为三维仿射变换:
左(4-2-1)
即:Q的坐标是P的坐标的线性组合。它可以用齐次坐标来表示:
左(4-2-2)
仿射变换将矢量变换成为矢量。如上一节所述,如果空间矢量V的坐标是V x, V y和V z,它的坐标框架表示(即齐次坐标表示)是一个第4个分量为0的列矢量。它的仿射变换为:
左(4-2-3)
可见,矢量V被变换成为另外一个矢量:它的齐次坐标的第4个分量也是0。
(4―2―1)
,
,
。
(4―2―2)
。
(4―2―3)
。
。
(4―2―2)
。
(4―2―3)
。
三维几何变换
|
利用齐次坐标和仿射变换,可以实现所有的三维几何变换。任何复杂的几何变换都可以分解成为比例、剪切、反射、旋转和平移等等简单变换的组合。 4.3.1 比例 在作比例和旋转变换时,都应当指定一个参考点。在此,我们先假定参考点是原点,在4.3.6节中我们将介绍绕任意点的平移和旋转变换。 |
比例变换是对物体按某种比例进行放大或缩小的一种几何变换。以坐标原点为参考点,沿x、y和z坐标轴分别独立地缩放α x 、α y 和α z 倍的比例变换可以用齐次坐标表示如下(见图4.3):
P′=SP
其中,P和P′分别是用齐次坐标表示的变换前和变换后的点,P=[x y z 1] T, P′=[x′ y′ z′ 1] T; S是比例变换矩阵,
(4-3-1)
。
图4.3 比例变换
|
|
其逆变换的变换矩阵
(4-3-2)
。
对于任何一个三维几何变换,一旦知道了它的变换矩阵(如S),这个变换就唯一确定了。所以,下面我们重点介绍其它几何变换的变换矩阵。