matlab机器人建立动力学模型,机械臂动力学建模(1)- 建立机器人模型
建立机器人模型)
机械臂
参考资料
建模
D-H参数
建关节
建立机器人
求初始机械臂状态,并显示
改进
另一种建模
机械臂

我使用的aubo的i5机械臂作为实验目标,也是用i5的D-H参数进行建模,前期使用matlab机器人工具箱进行仿真,熟悉机械臂的运动学算法,之后再在实际的机械臂上实验。
参考资料
我使用的是matliab机器人工具箱,具体的一些功能和操作可以参考:
清华大学出版社的《机器人仿真与编程技术》一书
以及我之前关于matlab机器人工具箱的7篇博文:
链接: 第一篇.等
建模
D-H参数
首先我们找到aubo_i5的D-H参数:

主要的参数d与a存入到matlab变量中
d1 = 0.122
d2 = 0.1215
a2 = 0.408
a3 = 0.376
d5 = 0.1025
d6 = 0.094
建关节
先熟悉Link:
>> Link
ans =
Revolute(std): theta=q, d=0, a=0, alpha=0, offset=0
根据D-H参数建立6个关节:
L(1)=Link([pi,d1,0,0],'modified')
L(2)=Link([-pi/2,d2,0,-pi/2],'modified')
L(3)=Link([0,0,a2,pi],'modified')
L(4)=Link([-pi/2,0,a3,pi],'modified')
L(5)=Link([0,d5,0,-pi/2],'modified')
L(6)=Link([0,d6,0,pi/2],'modified')
建立机器人
robot =SerialLink(L,'name','aubo_i5')
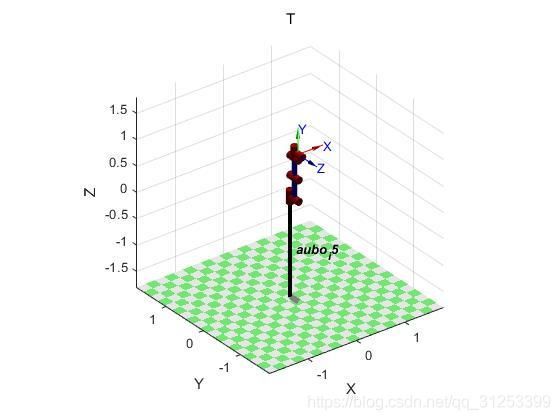
求初始机械臂状态,并显示
T = robot.fkine([0 0 0 0 0 0 ])
title("T")
robot.plot([0 0 0 0 0 0 ])
效果图:
并且末端位姿为:
T =
1 0 0 0.784
0 0 1 0.2155
0 -1 0 0.0195
0 0 0 1
改进
但是到这里,我发现末端的姿态并不对,位置信息中x轴信息(0.784)不应该存在。机械臂各个Link中的theta似乎没有其作用。我自己尝试在定义Link的时候改变theta值,发现确实不起作用,只有在fkine求运动学正解的时候赋值(pi,-pi/2,0,-pi/2,0, 0)才会改变theta:
末端姿态也变成:
T =
1 0 0 0
0 0 -1 -0.2155
0 1 0 1.008
0 0 0 1
这会带来一个问题,实际电机的零位和模型零位不一致。看了Link的定义,发现theta的初始化受到offset的影响,除了前面的4个参数theta, d, a, alpha。第五个是关节类型,0为旋转,第六个就是offset,所以改变定义link的方式:
L(1)=Link([pi,d1,0,0,0,pi],'modified')
L(2)=Link([pi/2,d2,0,-pi/2,0,-pi/2],'modified',-pi/2)
L(3)=Link([0,0,a2,pi],'modified')
L(4)=Link([0,0,a3,pi,0,-pi/2],'modified',-pi/2)
L(5)=Link([0,d5,0,-pi/2],'modified')
L(6)=Link([0,d6,0,pi/2],'modified')
使得Link的参数变为:
robot =
aubo_i5:: 6 axis, RRRRRR, modDH, slowRNE
+---+-----------+-----------+-----------+-----------+-----------+
| j | theta | d | a | alpha | offset |
+---+-----------+-----------+-----------+-----------+-----------+
| 1| q1| 0.122| 0| 0| 3.14159|
| 2| q2| 0.1215| 0| -1.5708| -1.5708|
| 3| q3| 0| 0.408| 3.14159| 0|
| 4| q4| 0| 0.376| 3.14159| -1.5708|
| 5| q5| 0.1025| 0| -1.5708| 0|
| 6| q6| 0.094| 0| 1.5708| 0|
+---+-----------+-----------+-----------+-----------+-----------+
此时各个关节为0时,末端的位姿为:
T =
1 0 0 0
0 0 -1 -0.2155
0 1 0 1.008
0 0 0 1

至此初步建机器人模型成功
另一种建模
matlab可以直接读取URDF文件进行建模:
robot = importrobot('aubo_i5.urdf')
show(robot )
aubo的urdf模型和模型文件在git上:
链接: aubo_description.
在aubo_robot/aubo_description/里面有urdf和模型文件,如果用matlab读取urdf,需要把urdf中mesh filename属性修改,指到本地存mesh文件的地方。
修改后运行:
 具体的可以看我matlab工具箱的第8篇文章
具体的可以看我matlab工具箱的第8篇文章
链接: 通过URDF建立机器人模型.