卡尔曼滤波基本公式推导(高斯乘积法)
前言
卡尔曼滤波的推导这里给出两种推导方法:一种是利用高斯乘积定理和贝叶斯公式推导出来的,另一种借用的是最小误差的思想(IMSE)。关于卡尔曼滤波的应用场景以及通俗的解释,我相信各位读者已经在不同的平台有了了解,我这里我就不赘述了。
首先我们需要具备高斯乘积定理和贝叶斯公式的具体形式:
高斯乘积定理
![]()
其中
![]()
![]()
![]()
![]()
贝叶斯公式
在这里直接根据贝叶斯地推公式写出后验概率密度:

其中,
![]() 为归一化因子
为归一化因子
![]() 为似然函数
为似然函数
![]() 为预测概率
为预测概率
![]() 为
为![]() 时刻的后验概率估计
时刻的后验概率估计
这一部分开始正式的推导了!!!
在这里需要提一下,此方法的推导的宏观思路:以贝叶斯公式为方向,以高斯定理为工具进行推导的。
一、卡尔曼滤波的条件假设
1.目标动态方程和观测方程式是线性的:
![]()
![]()
2.在目标动态方程和观测方程中的噪声必须服从0均值协方差分别为Q、R 的高斯白噪声。
3.K-1时刻的后验概率密度是必须是均值为![]() 和方差为
和方差为![]() 的形式。
的形式。
二、目标动态方程和传感器观测方程
- 目标动态方程
![]()
式中,![]() 代表的是
代表的是![]() 时刻的目标状态,g 代表的是二阶连续可微的函数;噪声
时刻的目标状态,g 代表的是二阶连续可微的函数;噪声![]() 是系统随机输入的噪声,用于描述系统模型误差。
是系统随机输入的噪声,用于描述系统模型误差。
2. 观测方程
![]()
式中,![]() 代表
代表![]() 时刻目标观测向量,
时刻目标观测向量,![]() 代表的是二阶连续可微的函数;随机变量
代表的是二阶连续可微的函数;随机变量![]() 表示观测误差。此方程构造了目标状态
表示观测误差。此方程构造了目标状态![]() 和观测值
和观测值![]() 之间的定量关系。
之间的定量关系。
三、转移和预测密度函数
首先将状态转移密度表示为:
![]()
也可以理解并表示为:
![]()
其中![]() 是服从以0为均值的、
是服从以0为均值的、![]() 为方差的高斯分布的噪声。其中的
为方差的高斯分布的噪声。其中的![]() 是描述系统转移的方程,在大部分系统还有常数项的出现即
是描述系统转移的方程,在大部分系统还有常数项的出现即![]() 。
。
以上的部分可以称为先验估计的部分。
然后我们在设在![]() 时刻目标的后验概率密度为:
时刻目标的后验概率密度为:
![]()
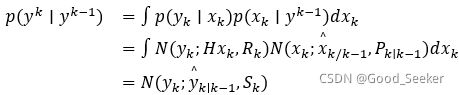
那么预测概率密度为:
![]()
Tips:这个式子中可以提出两个问题:
1.为什么![]() 为预测概率?
为预测概率?
A1:预测是借助以往的数据对未来或者现在的状态的预测,在这里是将上一时刻的观测值作为依据,对此时刻的状态进行预测。理解为:在观测值为![]() 的条件下,
的条件下,![]() 发生的概率。
发生的概率。
2.为何等号右边进行了这样的变形?
A2:在预测概率密度函数 缺少了在k-1 时刻的状态
缺少了在k-1 时刻的状态![]() ,所以怎么加入?我们使用积分的方法,在全域对其积分,这样就可以不改变原值的情况下加入 。为什么需要将
,所以怎么加入?我们使用积分的方法,在全域对其积分,这样就可以不改变原值的情况下加入 。为什么需要将![]() 加入?因为我们需要使用状态转移密度
加入?因为我们需要使用状态转移密度![]() 和后验概率密度
和后验概率密度![]() 进行对预测概率密度
进行对预测概率密度![]() 求解即
求解即
![]()
之后我们将先前假设的状态转移密度) 、后验概率密度
、后验概率密度![]() 代入上式可以得到:
代入上式可以得到:
![]()
![]()
其中,
![]()
![]()
![]()
![]()
至此,转移和预测概率密度函数都已推导完成。卡尔曼滤波预测功能的公式推导完成,总体可概括为以下两个式子:
![]()
![]()
四、似然函数(观测)与归一化因子
首先我们先假设似然函数需要满足:
![]()
同上我们也可以将它化成:
![]()
其中![]() 是测量噪声,服从0均值、
是测量噪声,服从0均值、![]() 为协方差的高斯分布。
为协方差的高斯分布。
在贝叶斯递推公式中的归一化可以表示为:
其中
![]()
![]()
这里运用积分的目的也是为了加入归一化中本身不含有的一项因子(这里是![]() )。同样是使用高斯乘积定理得到最后的结果。
)。同样是使用高斯乘积定理得到最后的结果。
至此似然函数和归一化因子的推导完成。在我的理解里:似然函数的含义就是“应该是这样”的猜测,结合在这里就是借助此时刻先验估计![]() 对测量值
对测量值![]() 的估计。归一化因子的作用:保证贝叶斯后验估计分布特性是一个概率密度函数,也可以根据其式子
的估计。归一化因子的作用:保证贝叶斯后验估计分布特性是一个概率密度函数,也可以根据其式子![]() 与
与![]() 的类比可以得到,这是根据前一时刻测量结果估计此时刻的一个概率估计。
的类比可以得到,这是根据前一时刻测量结果估计此时刻的一个概率估计。
五、条件密度函数
我们将之前推导得到的预测函数(先验)、似然函数、归一化参数代入贝叶斯递推公式中可得:
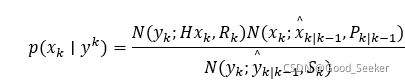
再使用高斯乘积定理可以得到:

然后约分可以得到:
![]()
其中
![]()
![]()
![]()
这里的![]() 就是卡尔曼增益,是卡尔曼递推中及其重要的一个变量,后验估计和最终的估计都是借助卡尔曼增益运算的结果。
就是卡尔曼增益,是卡尔曼递推中及其重要的一个变量,后验估计和最终的估计都是借助卡尔曼增益运算的结果。
总结一下 :卡尔曼滤波基本公式
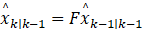 :先验估计表征的是从上一时刻到此时刻系统变化规律。
:先验估计表征的是从上一时刻到此时刻系统变化规律。
![]() : 先验估计协方差
: 先验估计协方差
![]() :测量函数式是测量值和先验估计的桥梁。
:测量函数式是测量值和先验估计的桥梁。
![]() :归一化参数式的协方差。
:归一化参数式的协方差。
![]() :卡尔曼增益。
:卡尔曼增益。
![]() :后验估计是系统最终采取的值。
:后验估计是系统最终采取的值。
![]() :后验估计协方差
:后验估计协方差