【论文阅读】【ICLR 2022】 PointMLP:Rethinking Network Design and Local Geometry in Point Cloud:A Simple ...
PointMLP:Rethinking Network Design and Local Geometry in Point Cloud: A Simple Residual MLP Framework . ICLR 2022
1. 四个问题
- 解决什么问题
- 点云随着CV领域的发展而发展(毕竟点云属于CV领域),先前的工作主要从设计局部特征提取器出发,所用方法有convolution, graph, or attention mechanisms。 这些精妙设计损害了推理速度,而且近些年性能也饱和了。
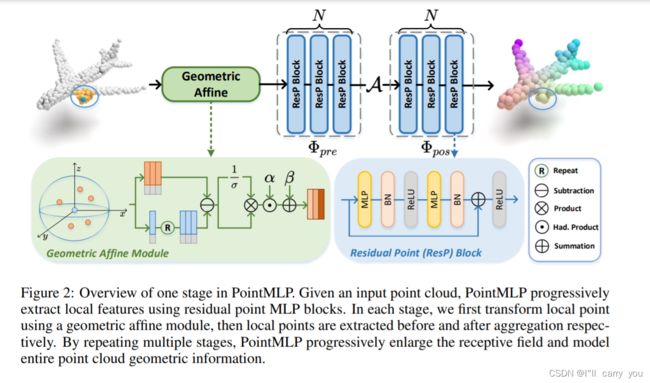
- 这篇paper不再从 exploring sophisticated local geometric extractors出发,只用带残差连接的MLP模块堆叠,大道至简。
To capture the 3D geometries, prior works mainly rely on exploring sophisticated local geometric extractors, using convolution, graph, or attention mechanisms. These methods, however, incur unfavorable latency during inference and the performance saturates over the past few years
We find detailed local geometrical information probably is not the key to point cloud analysis – we introduce a pure residual MLP network, called PointMLP, which integrates no local geometrical extractors but still performs very competitively.
- 用什么方法解决
- 带残差连接的MLP模块
- 效果如何
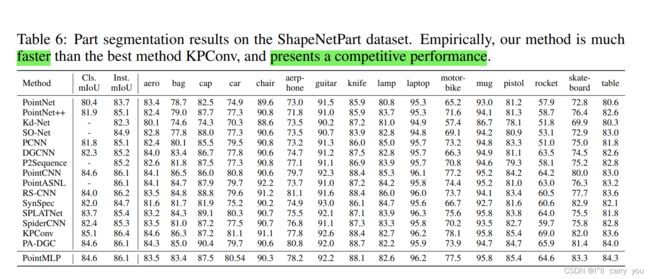
- 在3D Point Cloud Classification的ModelNet40和ScanObjectNN benchmark都取得第一,在3D shape part segmentation task on the ShapeNetPart benchmark 领域还差一点(a competitive performance)
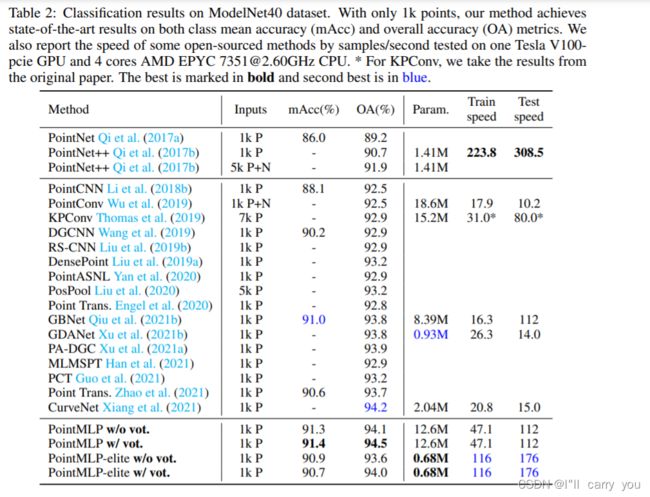
ModelNet40 达到准确率94.5,比第二名CurveNet超出0.3%(94.5% vs. 94.2%),作者说这是一个 promising achievement,因为ModelNet40的结果已经在94%停留了很长时间了。
Experimental results are presented in Table 2.
Among these methods, our PointMLP clearly outperforms state-of-the-art method CurveNet by 0.3% (94.5% vs. 94.2%) overall accuracy with only 1k points.
Note that this improvement could be considered as a promising achievement since the results on ModelNet40 recent methods have been saturated around 94% for a long time.
Even without the voting strategy (Liu et al., 2019b), our PointMLP still performs on par or even better than other methods that are tested with voting strategy.
- 此外,推理速度也很快,比第二名CurveNet准确度高的同时快2倍train速度,7倍test速度
Compared to most recent CurveNet, PointMLP trains 2× faster, tests 7× faster, and is more accurate on ModelNet40 benchmark.

- 还存在什么问题
?
2. 论文介绍
相关工作

PointMLP 一个stage
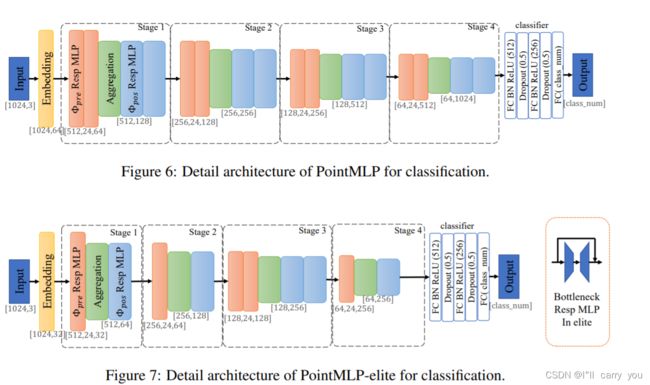
两个版本,elite更精简,在PointNet Qi et al的代码基础上改
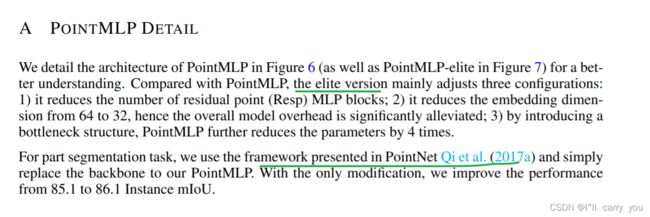
整个网络架构
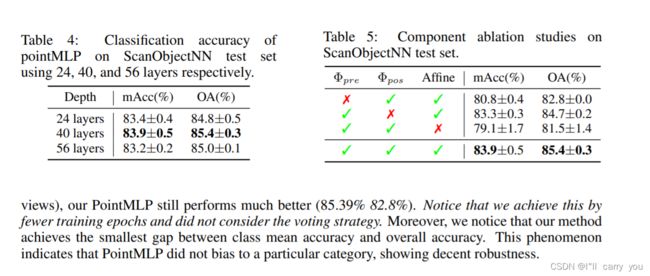
层数40层最好(怎么算的?没看懂)

消融实验:层数 和 主要模块 和 仿射模块

实验结果:
ModelNet40

Classification results on ModelNet40 dataset
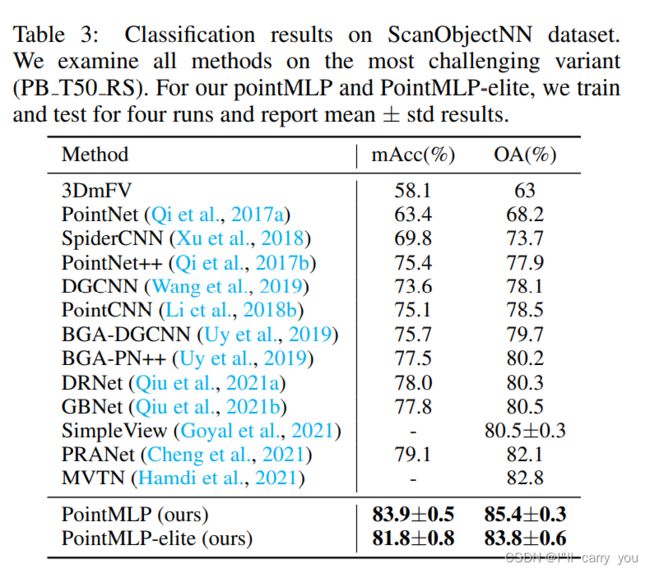
Classification results on ScanObjectNN dataset
Part segmentation results on the ShapeNetPart dataset.
3. 参考资料
paperwithcode排名:https://paperswithcode.com/sota/3d-point-cloud-classification-on-modelnet40
论文:https://paperswithcode.com/paper/rethinking-network-design-and-local-geometry
代码:https://github.com/13952522076/pointMLP-pytorch
4. 收获
只用MLP和残差连接就可以获得最好效果?
MLP是弹性最大的函数,什么都能映射做到,但是训练会不会难?论文中加了第一步仿射变换辅助训练
MLP,大道至简?
MLP和其它组合(卷积,图,注意力)会不会更好?
只做了3个数据集(ModelNet40, ScanObjectNN, ShapeNetPart ),能否具有说服力?大规模的点云好用吗?(不过这3个也是常见的数据集了)
就像作者说的,PointMLP:simplicity and efficiency,是否复杂的操作子是不必要的?重新思考网络的设计和局部结构?
We hope this novel idea will inspire the community to rethink the network design and local geometry in point cloud.
PointMLP可以当作现在的基线来考虑吗?传承于PointNet++,说明PointNet++的架构设计还是合理的,加多一点现在的trick就能提点。
还真的有,PointNeXt,最近看的 -2022-07-30