目标检测从入门到精通的一个项目笔记
知识点1:
项目已经部署上线:Web端演示、百度机器人端识别演示
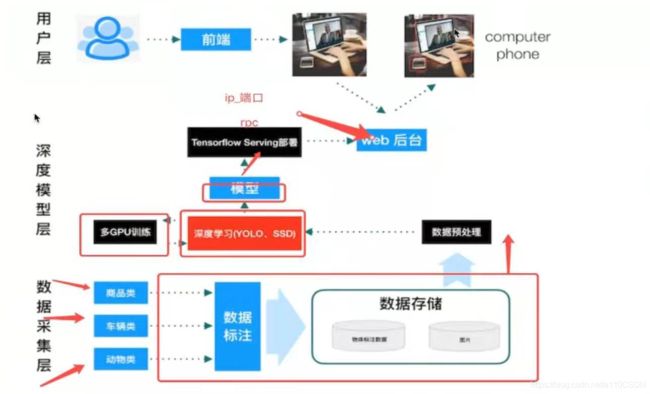
项目结构:数据采集层~数据收集标注,深度模型层~YOLO,SSD,模型导出,Serving部署, 用户层~前端交互,(Web后台)对接部署模型
知识点2:
1】两步走的目标检测:先找出候选区域,后对区域进行调整进行分类
2】端到端的目标检测:采用一个网络一步到位,输入图片,输出位置和类别
知识点3:
目标检测的任务:
分类:。N个类别 。输入:图片 。输出:类别 。评估指标:accuracy(mAP)
定位: 。N个类别 。输入:图片 。输出:物体的位置坐标 。评估指标:IOU 。bounding box(bbox):(x,y,w,h) x,y表示物体的中心点位置,w,h表示中心点距离物体两边的长宽
xmin,ymin,xmax,ymax: 物体位置的左上角坐标、右下角的坐标
知识点4:
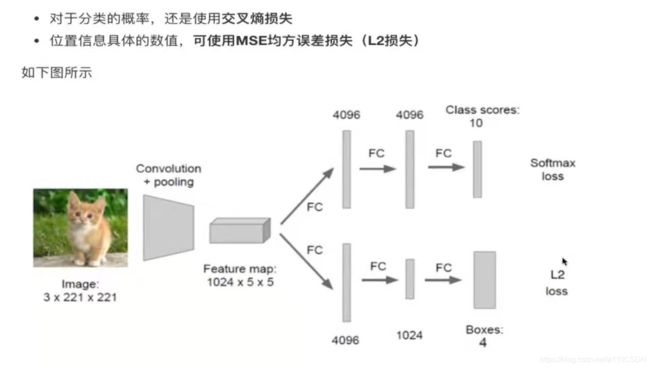
增加一个全连接层,FC1、FC2。Ground-truth bounding box(标注框)和Predicted bounding box(预测框)
FC1:作为类别的输出。FC2:作为这个物体位置数值的输出。
知识点5:
R-CNN:对于多个目标的情况,就不能以固定个个数输出物体的位置值
5.1Overfeat模型
5.1.1滑动窗口
过程:暴力方法是从左到右、从上到下滑动窗口,利用分类识别目标。重点注:问题变成每张子图输出类别和位置,变成分类问题。
5.2完整的R-CNN结构
1、首先定义K个窗口,每个窗口滑动M次 2、SVM~分类 regressor~boundary box
缺点:有些物体的适应框不一样
5.3评估指标
mAP= 所有类别的AP之和、类别的总个数,AP(average precision)就是曲线下的面积(ROC和AUC),每个类别的平均AUC
5.4缺点
步骤繁琐:微调网络+训练SVM+训练边框回归器,时间长,模型多,处理速度慢
知识点6:SPP-Net(Spatial Pyramid Pooling Network)
1、图片输入到网络先得到一个feature map
2、原图中的通过SS得到的候选区域直接映射到feature map对应位置(S是每一个卷积层的步长相乘strides)
3、映射过来的候选区域的特征,经过SPP层(空间金字塔结构)解决什么问题:将原候选区域的特征图转换成固定大小的特征向量

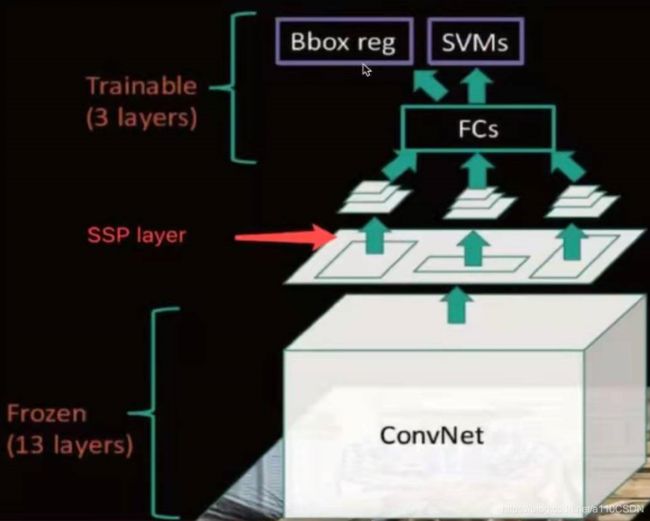

4、优点:SPPNet在R-CNN的基础上提出了改进,通过候选区域和feature map的映射,配合SPP层的使用,从而达到了CNN层的共享计算,减少了运算时间
缺点:训练依然过慢、效率低,特征需要写入磁盘(因为SVM的存在) 分阶段训练网络:选取候选区域、训练CNN.训练SVM、训练bbox回归器, SPPNet反向传播效率低