机器人实验4---baxter 机械臂运动控制
1.安装gazebo及相关依赖包
打开终端,运行如下指令:
http://gazebosim.org/tutorials?tut=install_ubuntu&cat=install
我的版本要把kinetic改成melodic
$ sudo apt-get install gazebo7 ros-kinetic-qt-build ros-kinetic-gazebo-ros-control ros-kinetic-gazebo-ros-pkgs ros-kinetic-ros-control ros-kinetic-control-toolbox ros-kinetic-realtime-tools ros-kinetic-ros-controllers ros-kinetic-xacro python-wstool ros-kinetic-tf-conversions ros-kinetic-kdl-parser
(若ros安装的是桌面完整版则已安装gazebo 7.0,实验电脑若已安装完成则不需要进行再次安装)
2.启动gazebo
打开终端,运行指令:
$ roscore
$ rosrun gazebo_ros gazebo
启动gazebo后界面如下:
 在终端中执行如下指令:
在终端中执行如下指令:
$ rostopic list
若安装成功则显示如下话题:
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/set_link_state
/gazebo/set_model_state
同样也可以通过查看服务列表中是否有关于gazebo的服务来判定是否安装成功。
$ rosservice list
4.机器人仿真包安装
(1)关闭所有终端,打开新终端,安装模型文件到工作空间:
$ cd ~/catkin_ws/src
$ wstool init .
$ wstool merge https://raw.githubusercontent.com/RethinkRobotics/baxter_simulator/kinetic-devel/baxter_simulator.rosinstall
$ wstool update
编译工作空间:
$ source /opt/ros/kinetic/setup.bash
$ cd ~/catkin_ws
$ catkin_make
$ cp src/baxter/baxter.sh .
(2)启动机器人仿真环境
打开终端,运行环境配置脚本:
$ source /opt/ros/kinetic/setup.bash
$ cd ~/catkin_ws
$ ./baxter.sh sim
通过launch文件,启动gazebo并载入机器人仿真模型:
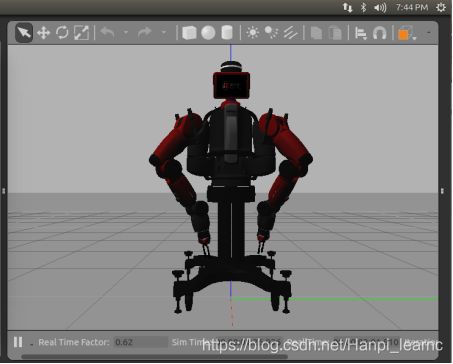
$ roslaunch baxter_gazebo baxter_world.launch
指令成功运行后会出现如下画面,可以看到baxter已载入gazebo的3D视图区,在左侧world标签models分支下可以查看到baxter。
 5.打开一个新的终端重复步骤4(2)中的操作,进入到如下环境
5.打开一个新的终端重复步骤4(2)中的操作,进入到如下环境
6.机器人使能
$ rosrun baxter_tools enable_robot.py -e
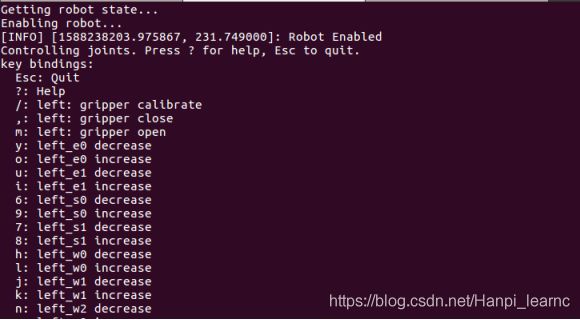
7.通过键盘控制机器人,
rosrun baxter_examples joint_position_keyboard.py
运行结果如下:
此时键入‘?’寻求指令帮助,运行结果如下;
8.此时可根据提示对关节进行控制

9.运行baxter随机摆动程序
$ rosrun baxter_examples joint_velocity_wobbler.py
实验现象如下:

10.关闭随机摆动的例程,运行右臂跟随左臂程序
$ rosrun baxter_examples joint_velocity_puppet.py -l right
11.再打开一个新的终端运行第6步中通过键盘控制机器人的例程
$ rosrun baxter_examples joint_position_keyboard.py
运行结果如下:
此时键入‘?’寻求指令帮助,运行结果如下;

12.现在可根据提示对机器人的右臂关节进行控制,可以看到机器人左臂可以跟随右臂运动如下: