64位Ubuntu kylin 16.04搭建nfs网络文件系统
一 安装配置nfs服务
1.新建目录
mkdir /home/ning/rootfs
2.安装nfs服务
ning@ENVY:/$ sudo apt install nfs-kernel-server
正在读取软件包列表... 完成
正在分析软件包的依赖关系树
正在读取状态信息... 完成
将会同时安装下列软件:
keyutils libnfsidmap2 libtirpc1 nfs-common rpcbind
建议安装:
open-iscsi watchdog
下列【新】软件包将被安装:
keyutils libnfsidmap2 libtirpc1 nfs-common nfs-kernel-server rpcbind
升级了 0 个软件包,新安装了 6 个软件包,要卸载 0 个软件包,有 103 个软件包未被升级。
需要下载 468 kB 的归档。
解压缩后会消耗 1,874 kB 的额外空间。
您希望继续执行吗? [Y/n] y
3.修改/etc/exports文件
vim /etc/exports
在最后添加 /home/ning/rootfs *(rw,sync,no_root_squash,no_subtree_check)
/home/ning/rootfs :nfs客户端加载目录
* :允许所有的网段访问,也可以使用具体的IP
rw :挂接此目录的客户端对该共享目录具有读写权限
sync :资料同步写入内存和硬盘
no_root_squash :root用户具有对根目录的完全管理访问权限。
no_subtree_check:不检查父目录的权限。
注意,*和后面的括号不能出现空格。
4. 重启rpcbind 服务
ning@ENVY:/$ sudo /etc/init.d/rpcbind restart
[ ok ] Restarting rpcbind (via systemctl): rpcbind.service.
5、重启nfs服务
ning@ENVY:/$ sudo /etc/init.d/nfs-kernel-server restart
[ ok ] Restarting nfs-kernel-server (via systemctl): nfs-kernel-server.service.
6.测试nfs服务是否成功
ning@ENVY:/tiny4412$ sudo /etc/init.d/nfs-kernel-server status
● nfs-server.service - NFS server and services
Loaded: loaded (/lib/systemd/system/nfs-server.service; enabled; vendor preset: enabled)
Active: active (exited) since 二 2016-11-08 17:09:21 CST; 10min ago
Process: 2488 ExecStart=/usr/sbin/rpc.nfsd $RPCNFSDARGS (code=exited, status=0/SUCCESS)
Process: 2484 ExecStartPre=/usr/sbin/exportfs -r (code=exited, status=0/SUCCESS)
Main PID: 2488 (code=exited, status=0/SUCCESS)
CGroup: /system.slice/nfs-server.service
11月 08 17:09:21 ENVY systemd[1]: Starting NFS server and services...
11月 08 17:09:21 ENVY systemd[1]: Started NFS server and services.
showmount -e
ning@ENVY:/$ sudo mount -t nfs localhost:/home/ning/rootfs /mnt
ning@ENVY:~$ ls /mnt
bin dev etc home lib linuxrc mnt proc root sbin sys tmp usr
ning@ENVY:/$ sudo umount /mnt
二,制作busybox
busybox官网
https://busybox.net/
因为使用最新的busybox-1.25.1.tar.bz2制作总是出问题,提示宏没有定义,百度找到了解决的办法,就是拷贝.h但是并没有什么卵用,找了个低版本的,busybox-1.23.2.tar.bz2
1.找到busybox-1.23.2.tar.bz2并下载下来,解压
liudijiang@ubuntu:~/work$ tar xfbusybox-1.23.2.tar.bz2
2.配置busybox
liudijiang@ubuntu:~/work/busybox-1.23.2$make menuconfig

1)配置动态链接库和设置编译器前缀
进入Busybox Setting菜单后进入Build Options菜单

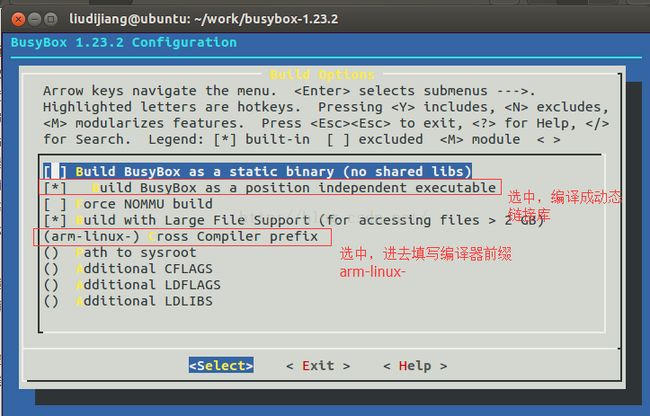
这里编译器是arm-linux-gcc,所以前缀填arm-linux-,这里选择动态链接库,链接的是arm-linux-gcc的库,后面要从安装arm-linux-gcc的地方考出要用到的库。
2)安装路径
进入Installation Options


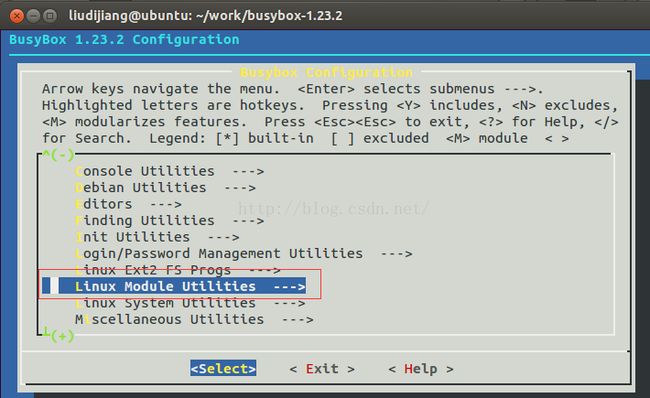
3)配置模块命令
进入Linux Module Utilities
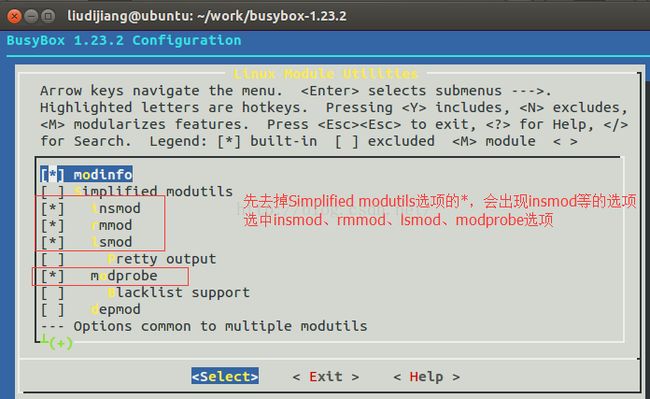
pretty output、blacklist support、depmod选进去也行。
4)保存配置
进入Save Configuration to an Alternate File菜单
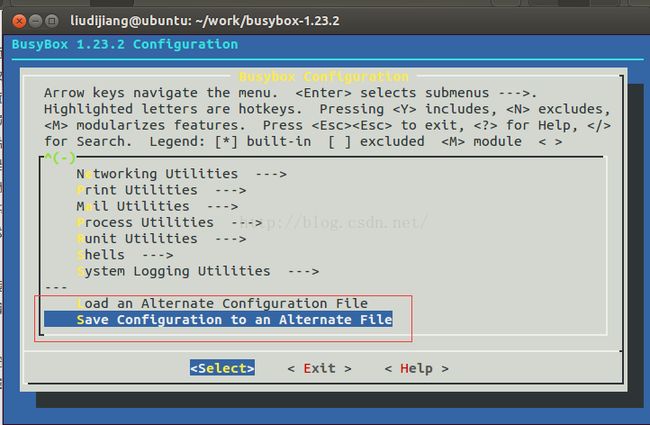
直接ok就行
3.编译,安装
liudijiang@ubuntu:/tiny4412/busybox-1.23.2$make -j16;make install -j16
liudijiang@ubuntu:/tiny4412$ ls rootfs/
bin linuxrc sbin usr
bin sbin usr三个文件夹存放各种命令
linuxrc是一个软连接文件,连接到bin/busybox程序
4.检测busybox是否成功
liudijiang@ubuntu:~/work/rootfs$ filebin/busybox
bin/busybox: ELF 32-bit LSB shared object, ARM, EABI5 version 1 (SYSV),dynamically linked (uses shared libs), stripped
上面显示ARM平台运行,说明安装成功了。
5.完善动态链接库
我们在busybox设置的是动态链接库,而且编译器是arm-linux-gcc,找到安装arm-linux-gcc的安装路径
liudijiang@ubuntu:~/work/rootfs$ which arm-linux-gcc
/opt/FriendlyARM/toolschain/4.5.1/bin/arm-linux-gcc
上面是我的路径,/opt/FriendlyARM/toolschain/4.5.1/arm-none-linux-gnueabi/lib,这个就是要复制出来的动态库的路径,把里面的动态链接文件复制到rootfs文件夹下
先在rootfs文件下创建其他文件夹,模仿ubuntu系统,看看他的根目录下有哪些文件夹
liudijiang@ubuntu:~/work/rootfs$ mkdiretc/init.d dev home proc tmp var mnt root sys opt lib –p
复制动态链接文件
liudijiang@ubuntu:~/work/rootfs$ cp/opt/FriendlyARM/toolschain/4.5.1/arm-none-linux-gnueabi/lib/*.so* lib/ -rap
6.创建控制台设备文件
liudijiang@ubuntu:~/work/rootfs$ sudo mknoddev/console c 5 1
这个文件是字符设备,主设备号是5,次设备号是1,只能用mknod命令创建
7.创建etc/下必要文件
liudijiang@ubuntu:~/work/rootfs/etc$ tree./
./
├── fstab 必要文件,挂着文件中指定的所有文件系统
├── group 不是必要文件,要设置密码时需要
├── init.d 必要的文件夹
│ ├── rcS 必要文件
│ └── rcS.bak 必要文件
├── inittab 从busybox的example文件下复制
├──passwd 不是必要文件,要设置密码时需要
├── profile 不是必要文件,可以创建来支持命令提示格式配置,配置系统环境变量
└── shadow 不是必要文件,要设置密码时需要
1)创建etc/inittab文件
我们可以用busybox提供的示例文件复制过来
liudijiang@ubuntu:~/work/busybox-1.23.2/examples$ls
inittab …
将以下内容(59行左右)
# Start an "askfirst" shell onthe console (whatever that may be)
::askfirst:-/bin/sh
# Start an "askfirst" shell on/dev/tty2-4
tty2::askfirst:-/bin/sh add "console" in line 60, commentline 62 - 64
tty3::askfirst:-/bin/sh
tty4::askfirst:-/bin/sh
修改为
# Start an "askfirst" shell onthe console (whatever that may be)
console::askfirst:-/bin/sh #这里加上console,也就是前面在dev文件夹下创建的控制台
# Start an "askfirst" shell on/dev/tty2-4
#tty2::askfirst:-/bin/sh add "console" in line 60, commentline 62 - 64
#tty3::askfirst:-/bin/sh
#tty4::askfirst:-/bin/sh
2)fstab文件
手动创建一个fstab文件,添加以下内容
tmpfs /dev/shm tmpfs defaults 0 0
devpts /dev/pts devpts defaults 0 0
sysfs /sys sysfs defaults 0 0
proc /proc proc defaults 0 0
第一列是挂载设备,第二列是挂载目录,第三列是挂载文件系统类型,第四列是挂载选项分别有
auto:系统自动挂载,fstab默认就是这个选项
ro:read-only
rw:read-write
defaults:rw,suid,dev,exec,auto,nouser,and async
第五列为dump选项,设置是否让备份程序dump备份文件系统,0为忽略,1为备份
第六列为fsck选项,告诉fsck程序以什么顺序检查文件系统,0为忽略
3)rcS文件
在init.d文件夹下创建,添加以下内容
#!/bin/sh
mount –a #挂载fstab文件中所有指定的文件系统
mkdir /dev/pts
mount -t devpts devpts /dev/pts
echo /sbin/mdev >/proc/sys/kernel/hotplug
mdev –s #创建控制台
/bin/hostname ubuntu #这里修改hostname
注意,查看一下rcS文件的权限,如果没有执行权限的话,开发板的linux内核不能运行这个文件
sudo chmod +x rcS 添加权限
4)profile文件
添加以下内容
USER="`id -un`"
LOGNAME=$USER
PS1='[\u@\h \W]# '
PATH=$PATH
HOSTNAME=`/bin/hostname`
#导出环境变量
export USER LOGNAME PS1 PATH
5)group、passwd、shadow三个文件是要用密码登陆的时候才用到的,可以从linux系统的/etc/group、/etc/passwd 、/etc/shadow 拷贝过来
然后修改inittab文件,原来修改的地方改成:
# Start an "askfirst" shell on the console (whatever that may be)
#console::askfirst:-/bin/sh
::respawn:-/sbin/getty 115200 ttySAC0
# Start an "askfirst" shell on /dev/tty2-4
#tty2::askfirst:-/bin/sh add "console" in line 60, commentline 62 - 64
#tty3::askfirst:-/bin/sh
#tty4::askfirst:-/bin/sh
这里用的账号密码时原来ubuntu linux上已有的账号密码
这里还要修改passwd文件的内容,将所有”/bin/bash“ 改成“/bin/sh”
这是修改shell脚本的类型,PC上linux运行的是bash shell脚本,开发板linux运行的是sh shell脚本。
不用这个也可以,不用的时候开发板开机运行直接进入命令行了,加上这些的时候,开机运行后要登陆的账号密码才能进入开发板的linux系统,纯粹是为了好玩的。。。
小结一下这部分:
1. inittab,rcS,fstab关系
系统启动挂载文件系统--->
--->读取/etc/inittab文件,解析其中定义的动作
--->根据sysinit定义的process执行/etc/init.d/rcS
--->/etc/init.d/rcS中第一条命令 mount -a
--->读取/etc/fstab文件
--->根据文件列表内容逐个挂载其中的设备到指定地
2.profile文件
设置环境变量,根据这里设置命令提示符号相关的环境变量
用户可以根据自己需要添加环境变量
3./etc/init.d/rcS执行系统初始化时候,想开机启动的程序都可以写在这个文件中
4.group存放用户ID信息,命令提示符号格式配置需要使用这个文件
5.passwd和用户相关的密码
等会设置好电脑、ubuntu、开发板的ip后,开发板uboot设置好启动后挂载ubuntu的这个rootfs,就能够在电脑和Xshell上通用rootfs这个文件夹了。开发板linux运行起来也就是读取rootfs里面这些文件,运行这些文件的内容了。
三,设置电脑主机、开发板的ip地址
先把开发板和电脑网线连接起来,让开发板跑起来,虽然这时候什么也没动,但应该能看到开发板和电脑的网口的指示灯都是亮的
设置电脑的ip
为了开发方便,手动设置成静态ip



保存即可
liudijiang@ubuntu:~/work/rootfs$ ifconfig
eth0 Link encap:以太网 硬件地址00:0c:29:29:30:8a
inet 地址:192.168.3.27 广播:192.168.3.255 掩码:255.255.255.0
inet6 地址: fe80::20c:29ff:fe29:308a/64 Scope:Link
UP BROADCAST RUNNING MULTICAST MTU:1500 跃点数:1
接收数据包:2421 错误:0 丢弃:0 过载:0 帧数:0
发送数据包:2849 错误:0 丢弃:0 过载:0 载波:0
碰撞:0 发送队列长度:1000
接收字节:335705 (335.7 KB) 发送字节:2430579(2.4 MB)
中断:19 基本地址:0x2000
lo Link encap:本地环回
inet 地址:127.0.0.1 掩码:255.0.0.0
inet6 地址: ::1/128 Scope:Host
UP LOOPBACK RUNNING MTU:65536 跃点数:1
接收数据包:506 错误:0 丢弃:0 过载:0 帧数:0
发送数据包:506 错误:0 丢弃:0 过载:0 载波:0
碰撞:0 发送队列长度:0
接收字节:48008 (48.0 KB) 发送字节:48008(48.0 KB)
接下来是设置开发板的ip,复位开发板,进入uboot命令行模式下
设置的参数的命令
liudijiang # setenv gatewayip 192.168.3.1
还有ip地址,掩码也是一样设置,服务器ip设不设置都行
设置bootargs
liudijiang # setenv bootargs root=/dev/nfs nfsroot=192.168.0.6:/home/ning/rootfs/ ip=192.168.3.123:192.168.3.27:192.168.3.1:255.255.255.0::eth0:off init=/linuxrcconsole=ttySAC0 lcd=S70
设置bootcmd
setenv bootcmd ‘movi read kernel 040008000;movi read rootfs 0 41000000 100000;bootm 40008000 41000000’
查看结果
liudijiang # pri
baudrate=115200
bootargs=noinitrd root=/dev/nfs nfsroot=192.168.3.27:/home/liudijiang/work/rootfs/ ip=192.168.3.123:192.168.3.27:192.168.3.1:255.255.255.0::eth0:off init=/linuxrcconsole=ttySAC0 lcd=S70
bootcmd=movi read kernel 0 40008000;moviread rootfs 0 41000000 100000;bootm 40008000 41000000
bootdelay=3
ethaddr=00:40:5c:26:0a:5b
gatewayip=192.168.3.1
ipaddr=192.168.3.123
netmask=255.255.255.0
serverip=192.168.3.30
和NFS有关的选项:
root=/dev/nfs --使用NFS这个设备
NFS文件夹具体的路径
nfsroot=192.168.3.27:/home/liudijiang/work/rootfs ip=192.168.3.123:192.168.3.27:192.168.3.1:255.255.255.0::eth0:off
格式说明:
nfsroot=虚拟机Linux系统IP:根文件系统绝对路径 ip=开发板IP:虚拟机Linux系统IP:网关:子网掩码::开发板的网卡设备名(一般是eth0,不是虚拟机):off
以上配置的结果,电脑主机、虚拟机、开发板都在192.168.3这个网段,其他网段也行。。。重新启动后会发现已经挂载到ubuntu的那个目录下了,而且ping一下。。。能挂载上,肯定能ping通了。。。

而且我在Xshell里已经能进入开发板linux的命令行了
在tmp目录下新建个hello.c,这个当然是在ubuntu上用vim方便啦,然后顺便编译一下。我已经写好了,内容如下
liudijiang@ubuntu:~/work/rootfs/tmp$ cat hello.c
#include
void main(void)
{
printf("hellolinux!\r\n");
}
liudijiang@ubuntu:~/work/rootfs/tmp$arm-linux-gcc -o hello hello.c
liudijiang@ubuntu:~/work/rootfs/tmp$ ls
hello hello.c
因为是要在开发板上运行,所以是arm-linux-gcc
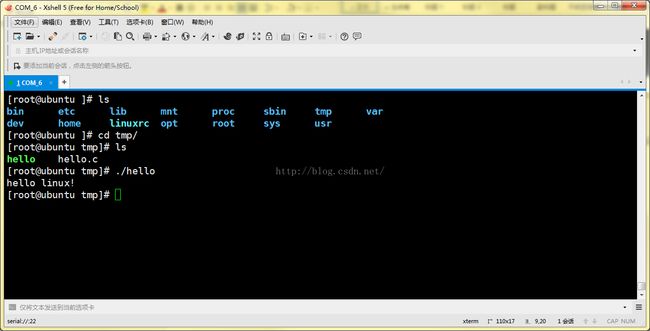
已经ok了。。。
然而在ubuntu下运行这个hello是不可执行的,因为ubuntu是x86,得gcc编译才可以运行。