回声消除NLMS算法详解
在视频或电话会议中,本地用户的声音在被本地麦克风采集后,通过系统传到远端,通过远端的扬声器播放,此时远端麦克风不可避免地会采集到扬声器播放的声音,又通过系统传回本地,并通过本地扬声器播放出来,本地用户就通过本地扬声器听到了自己的声音,这明显降低了会议通信质量。
为了提高语音的质量,就必须进行回声消除。当参考信号已知时,归一化最小均方(Normalized Least Mean Square,NLMS)算法能很好消除回声,它由最小均方算法扩展而来。
1 NLMS算法原理
回声消除系统基本结构如图1所示。
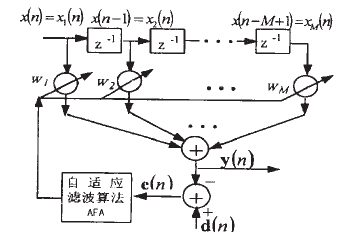
图1 回声消除系统基本结构
设置自适应滤波器系数w的所有初始值为0,即w(0) = 0,其长度为M。对输入信号进行采样,每次迭代取M个数据进行处理,输入矢量为
x(n) = [x1(n) x2(n) … xM(n)]T = [x(n)x(n-1) … x(n-M+1)]T
加权矢量为
w = [w1 w2… w3]
系统输出y(n)为
y(n) = wx(n)
y(n)相对于期望信号d(n)的误差为
e(n) = d(n) – y(n) = d(n) -wx(n)
运用最小均方误差准则,就是求使得E[|e(n)|^2]最小时的w,因为是通过对其求导并令其等于0求得的,而|e(n)|在最小点不可导,所以使用的是|e(n)|^2。对于LMS算法,其滤波器系数迭代公式为
w(n+1) = w(n) + 2µe(n)x(n)
其中µ是步长因子,0 < µ < 1/ xT(n)x(n),在LMS算法中其值是固定的,因而收敛速度较慢。
在LMS的基础上,用可变的步长因子代替固定的步长因子,就得到了NLMS算法,其迭代方程为
w(n+1) = w(n) + µ(n)e(n)x(n)=w(n) +ηe(n)x(n)/(δ+xT(n)x(n))
其中η是修正的步长常量,0 < η < 2,δ为一个较小的整数,一般取0.0001,防止输入数据矢量x(n)的内积过小使得µ(n)过大而引起稳定性能下降。NLMS算法的收敛速度较快,效果较LMS算法好。
2 性能仿真
用matlab编写程序仿真算法性能,分别对比NLMS算法与LMS算法的性能和不同步长参数η下NLMS算法的性能。代码如下:
|
clear all;
close all;
clc;
snr=
20;
order=
8;
Hn =[
0.8783 -
0.5806
0.6537 -
0.3223
0.6577 -
0.0582
0.2895 -
0.2710
0.1278 -
0.1508
0.0238 -
0.1814
0.2519 -
0.0396
0.0423 -
0.0152
0.1664 -
0.0245
0.1463 -
0.0770
0.1304 -
0.0148
0.0054 -
0.0381
0.0374 -
0.0329
0.0313 -
0.0253
0.0552 -
0.0369
0.0479 -
0.0073
0.0305 -
0.0138
0.0152 -
0.0012
0.0154 -
0.0092
0.0177 -
0.0161
0.0070 -
0.0042
0.0051 -
0.0131
0.0059 -
0.0041
0.0077 -
0.0034
0.0074 -
0.0014
0.0025 -
0.0056
0.0028 -
0.0005
0.0033 -
0.0000
0.0022 -
0.0032
0.0012 -
0.0020
0.0017 -
0.0022
0.0004 -
0.0011
0
0 ];
Hn=Hn(
1:order);
N=
1000;
EE=
zeros(N,
1); Loop=
150; mu=
0.5;
EE1=
zeros(N,
1);EE2=
zeros(N,
1);EE3=
zeros(N,
1);
for nn=
1:Loop
r=
sign(
rand(N,
1)-
0.5);
output=conv(r,Hn);
output=awgn(output,snr,
'measured');
win=
zeros(
1,order);
win1=
zeros(
1,order);
win2=
zeros(
1,order);
win3=
zeros(
1,order);
error=
zeros(
1,N)';
error1=
zeros(
1,N)';
error2=
zeros(
1,N)';
error3=
zeros(
1,N)';
for
i=order:N
input=r(
i:-
1:
i-order+
1);
y(
i)=win*input;
e=output(
i)-win*input;
e1=output(
i)-win1*input;
e2=output(
i)-win2*input;
e3=output(
i)-win3*input;
fai=
0.0001;
if
i<
200
mu=
0.32;
else
mu=
0.15;
end
win=win+
0.3*e*input'/(fai+input'*input);
% 不同步长的NLMS
win1=win1+
0.8*e1*input'/(fai+input'*input);
win2=win2+
1.3*e2*input'/(fai+input'*input);
win3=win3+
1.8*e3*input'/(fai+input'*input);
error(
i)=error(
i)+e^
2;
error1(
i)=error1(
i)+e1^
2;
error2(
i)=error2(
i)+e2^
2;
error3(
i)=error3(
i)+e3^
2;
% y1(i)=win1*input;
% e1=output(i)-win1*input;
% win1=win1+0.2*e1*input'; % LMS
% error1(i)=error1(i)+e1^2;
end
EE=EE+error;
EE1=EE1+error1;
EE2=EE2+error2;
EE3=EE3+error3;
end
error=EE/Loop;
error1=EE1/Loop;
error2=EE2/Loop;
error3=EE3/Loop;
% figure;
% error=10*log10(error(order:N));
% error1=10*log10(error1(order:N));
% plot(error,'r');
% hold on;
% plot(error1,'b.');
% axis tight;
% legend('NLMS算法','LMS算法');
% title('NLMS算法和LMS算法误差曲线');
% xlabel('样本');
% ylabel('误差/dB');
% grid on;
%
% figure;
% plot(win,'r');
% hold on;
% plot(Hn,'b');
% grid on;
% axis tight;
% figure;
% subplot(2,1,1);
% plot(y,'r');
% subplot(2,1,2);
% plot(y1,'b');
figure;
error=
10*
log10(error(order:N));
error1=
10*
log10(error1(order:N));
error2=
10*
log10(error2(order:N));
error3=
10*
log10(error3(order:N));
hold on;
plot(error,
'r');
hold on;
plot(error1,
'b');
hold on;
plot(error2,
'y');
hold on;
plot(error3,
'g');
axis tight;
legend(
'η = 0.3',
'η = 0.8',
'η = 1.3',
'η = 1.8');
title(
'不同步长对NLMS算法的影响');
xlabel(
'样本');
ylabel(
'误差/dB');
grid on;
|
来自CODE的代码片
输入信号为加了高斯噪声后的随机信号,首先我们对比一下NLMS算法和LMS算法的性能差异,取η = 1,δ = 0.001,µ = 0.2,得到两种算法的误差曲线如图2所示
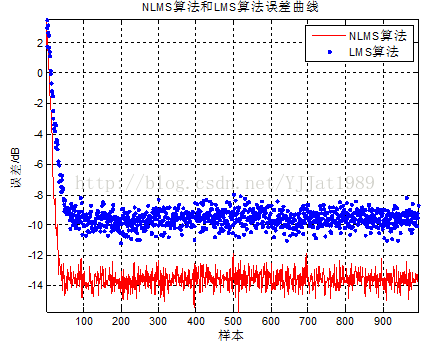
图2 NLMS算法和LMS算法误差曲线
图2中下降曲线的斜率反映了算法的收敛速度,稳定后的误差反映了算法的精度。由图可知,NLMS算法的收敛速度快于LMS算法,且NLMS算法精度也大于LMS算法。
然后分析步长大小对算法性能的影响。以NLMS算法为基础,分别分析当η= 0.3,η = 0.9,η = 1.3,η = 1.8(0< η < 2)时算法的收敛特性,得到误差曲线如图3所示。
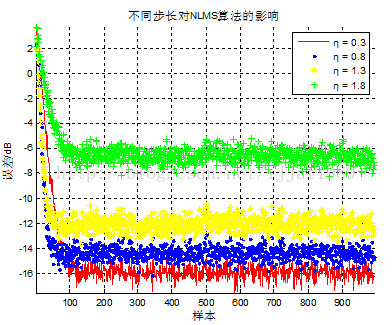
图3 不同步长对NLMS算法的影响
由图3可看出,随着步长的增大,算法收敛速度先有所提高,之后又下降,而算法精度却逐渐减小。
由以上两组仿真实验可以看出,算法自适应收敛时收敛速度和精度是一对矛盾,步长大,即收敛系数大,收敛速度可能有所改善,但精度却变差,反之亦然。
由于LMS算法中步长是不变的,所以很难找到一个适当的步长来解决这一矛盾;而NLMS算法则采用变步长的方式在保证精度的情况下缩短自适应收敛过程。实际应用中要不断调整步长,以得到算法的最优性能。
3 算法效果
分别采用NLMS算法和LMS算法来处理混响语音信号。此时输入信号是一段混响9秒的语音信号,参考信号是无混响的语音信号。为了有较快的收敛速度和精度,在NLMS迭代开始时设置步长η为0.32使算法较快收敛,之后设置步长η为0.15以得到较高精度。在LMS迭代中设置步长µ=0.1。代码如下:
|
clear all
close all
clc
hold off
sysorder=
50;
%抽头数
[inp,sr]=mp3read(
'T60=9.0.mp3');
%输入
inp=inp(:);
[d,sr] = mp3read(
'T60=0.mp3');
d=d(:);
totallength=
size(d,
1);
%步长
N=
length(inp);
%k=0:1382493;
k=
0:
691246;
%算法开始
w=
zeros(sysorder,
1);
%初始化
w1=
zeros(sysorder,
1);
%初始化
error=
zeros(N,
1);
%初始化
EE=
zeros(N,
1);
Loop=
15000;
for n=sysorder:N
u=inp(n:-
1:n-sysorder+
1);
%u的矩阵
%u=inp(n-sysorder+1:n);
%NLMS算法
y(n)=w'*u;
%系统输出
r(n)=u'*u;
%自相关矩阵
e(n)=d(n)-y(n);
%误差
srr(n)=
10*
log10(d(n)/(inp(n)-d(n)));
srr1(n)=
10*
log10(d(n)/(y(n)-d(n)));
%e(n)=inp(n)-y(n); %误差
fai=
1e-10;
%修正参数,防止r(n)过小导致步长值太大
if n<
2000
mu=
0.32;
else
mu=
0.15;
end
w=
0.8*w+mu*u*e(n)/(r(n)+fai);
%NLMS迭代方程
error(n)=error(n)+e(n)^
2;
%LMS算法
y1(n)=w1'*u;
e1(n)=d(n)-y1(n);
w1=
0.8*w1+
0.1*u*e1(n);
%LMS迭代方程
end
EE=EE+error;
error=EE/Loop;
error=error.^
2;
error(n)=error'*error;
% for i=sysorder:N1
% u1=inp2(i:-1:i-sysorder+1);
% y_out(i)=w'*u1;
% end
%srr=10*log10(d/(inp-d));
%srr1=10*log10(d/(y-d));
y=y(:);
y1=y1(:);
e=e(:);
e1=e1(:);
srr=srr(:);
srr1=srr1(:);
%y_out=y_out(:);
inp1=
reshape(inp,
691247,
2);
%inp3=reshape(inp2,342191,2);
d1=
reshape(d,
691247,
2);
y_nlms=
2*
reshape(y,
691247,
2);
y_lms=
2*
reshape(y1,
691247,
2);
%y_out1=20*reshape(y_out,342191,2);
error=
10*
log10(error);
e_nlms=
reshape(e,
691247,
2);
e_lms=
reshape(e1,
691247,
2);
error_nlms=
reshape(error,
691247,
2);
srr2=
reshape(srr,
691247,
2);
srr3=
reshape(srr1,
691247,
2);
figure(
1);
subplot(
3,
1,
1);
plot(k,inp1);
title(
'系统输出波形对比');
xlabel(
'样本n');
ylabel(
'混响9秒信号波形');
subplot(
3,
1,
2);
plot(k,y_nlms,
'r');
xlabel(
'样本n');
ylabel(
'NLMS输出信号波形');
subplot(
3,
1,
3);
plot(k,y_lms,
'g');
axis([
0
691246 -
1
1]);
xlabel(
'样本n');
ylabel(
'LMS输出信号波形');
sound(d1,sr);
sound(inp1,sr);
sound(y_nlms,sr);
mp3write(y_nlms,sr,
'nlms.mp3');
sound(y_lms,sr);
mp3write(y_lms,sr,
'lms.mp3');
|
来自CODE的代码片
其处理后波形图如图4所示。
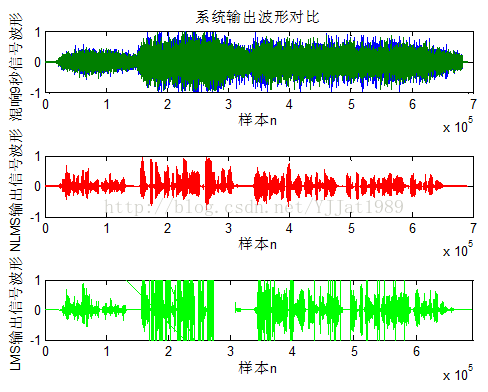
图4 NLMS算法和LMS算法去混响
由图4可看出,NLMS算法和LMS算法均成功的去掉了混响,实际听音表明NLMS算法得到的语音很清晰,LMS算法得到语音则有些失真。
转自:http://blog.csdn.net/yjjat1989/article/details/21614269